

Introduction
Methodology of literature review
Classification and harvest-related characteristics of legume crops
Development and evolution of legume harvesting machinery
Harvesting Mechanization by Crop Type
Soybeans
Groundnuts (Peanuts)
Pulses (Dry Peas, Lentils, Chickpeas, Dry and Faba Beans)
Fresh peas and fresh beans
Current challenges in legume harvesting
Mitigation methods and future prospects
Conclusions
Introduction
Legume crops play a vital role in global agriculture as sustainable and affordable sources of plant-based protein for both human and animal consumption (Cheng et al., 2019; Yanni et al., 2023). They provide essential amino acids, carbohydrates, dietary fiber, and minerals that are crucial for balanced nutrition, particularly in developing regions where access to animal protein is limited or costly (FAO, 2022; Maphosa and Jideani, 2017). Beyond their nutritional importance, legumes contribute to agricultural sustainability through biological nitrogen fixation. In symbiosis with Rhizobium bacteria, they convert atmospheric nitrogen into bioavailable forms that improve soil fertility and reduce dependence on synthetic fertilizers (Kebede, 2021; Oso and Ashafa, 2021). This ecological process enhances the productivity of crop rotations while mitigating greenhouse gas emissions from fertilizer production, thereby supporting sustainable agricultural intensification in line with global climate-action goals (McElwee et al., 2020).
Despite their agronomic and environmental benefits, harvesting remains one of the most labor-intensive and technically demanding stages of legume production (Hasan et al., 2020; Yadav et al., 2024). Manual practices such as hand-pulling, cutting, and pod collection require substantial labor and often lead to inconsistent product quality, pod shattering, and high field losses under uneven terrain or lodging conditions (Sterling et al., 2018). Partial mechanization using basic reapers and threshers has improved labor efficiency but remains limited by the structural diversity among legume species, including differences in stem rigidity, pod attachment strength, and maturity distribution (Pargi et al., 2024).
The development of integrated reaper–thresher combinations and combine harvesters has provided a practical pathway toward large-scale mechanization. These systems enhance field capacity and product uniformity while reducing labor dependency and harvest losses. In highly mechanized production environments, innovations such as flexible headers, automatic height control, and sensor-assisted yield monitoring have set new benchmarks for harvesting precision and operational stability (Paulsen et al., 2015). Nevertheless, mechanization adoption remains limited in many smallholder regions due to economic constraints, field heterogeneity, and insufficient adaptation to diverse crop morphologies.
Previous reviews on legume harvesting technologies have largely centered on individual crops, particularly soybeans (Gomaa et al., 2009; Gu et al., 2025b; Wang et al., 2025b), leaving significant gaps in understanding the mechanization requirements of other legume groups (Astanakulov et al., 2022; Negrete, 2015). Addressing these gaps, the present review provides a comprehensive synthesis of harvesting machinery across the four major legume categories defined by the Food and Agriculture Organization (FAO, 2022): soybeans, groundnuts, pulses, and fresh legumes. It examines the historical development and engineering principles of existing systems, analyzes crop-specific mechanical challenges, and explores emerging trends in intelligent and automated mechanization. By integrating current research findings and technological advances, this review aims to establish a coherent framework for developing efficient, adaptable, and sustainable legume harvesting machinery.
Methodology of literature review
To identify relevant studies on the mechanization of legume harvesting and its technological evolution, a systematic literature review was conducted. The review encompassed publications addressing harvesting machinery for various legume categories, combine harvester technologies, harvest loss analysis, and intelligent agricultural mechanization. Major academic databases, including ScienceDirect, Google Scholar, Web of Science, Scopus, and the ASABE Technical Library, were used for literature retrieval. The search covered the period 2000–2025, capturing both recent developments and foundational research relevant to mechanization. The search terms applied in each category are summarized in Table 1. The overall process of literature identification, screening, and selection is illustrated in Fig. 1.
Table 1.
Overview of search criteria used for literature retrieval.
| Crop category | Search terms* |
| General Mechanization | “legume harvesting” OR “pulse crop mechanization” OR “agricultural machinery” |
| Machinery Specifics | “combine harvester” OR “digger-shaker-inverter” OR “flex header” OR “stripper header” |
| Crops | “soybean” OR “groundnut” OR “peanut” OR “chickpea” OR “lentil” OR “drybean” OR “green pea” |
| Performance and Issues | “harvest loss” OR “mechanical damage” OR “seed breakage” OR “pod shattering” |
| Advanced Technology | “intelligent harvesting” OR “autonomous combine” OR “agricultural robotics” OR “machine vision in agriculture” OR “sensor fusion” |
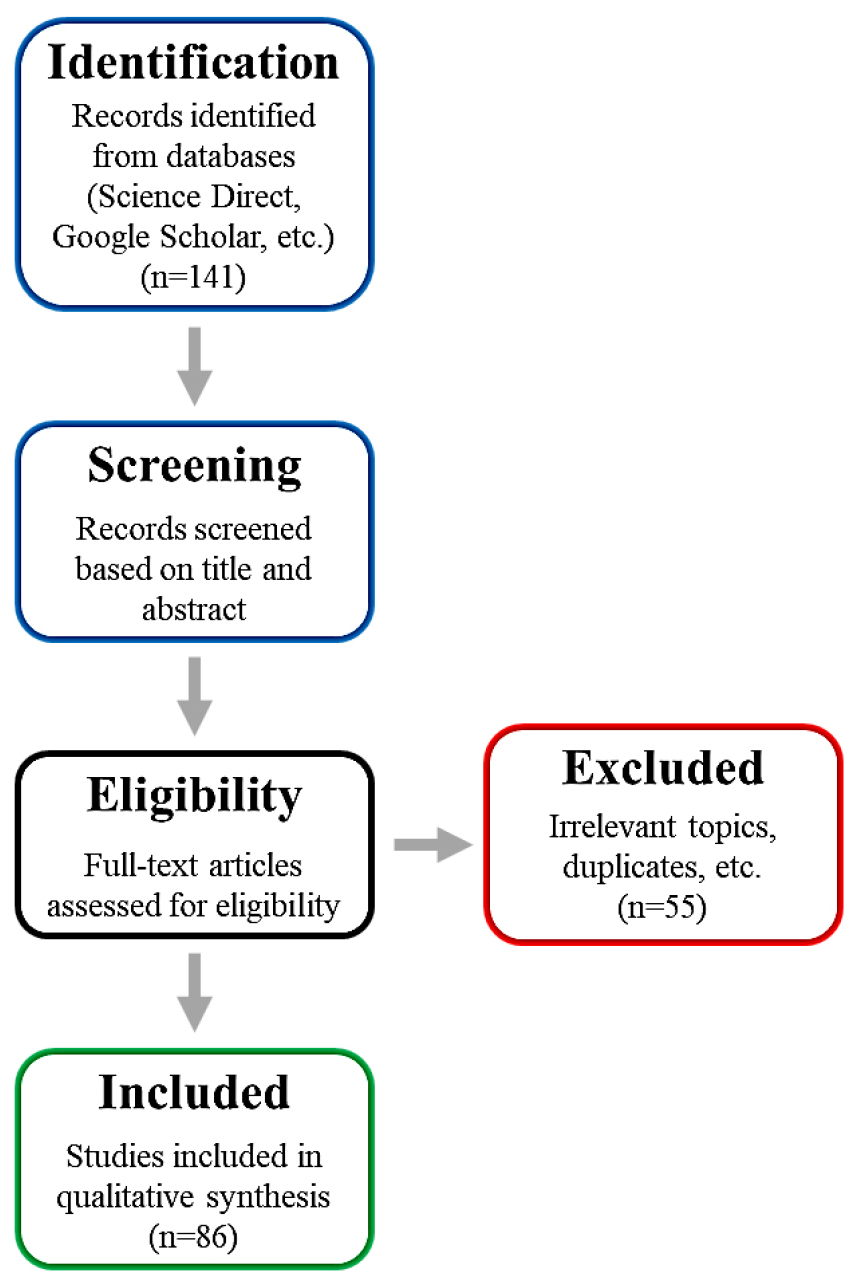
From the initially retrieved papers, a focused selection was made according to specific inclusion criteria. The selected studies met one or more of the following conditions: (1) research related to mechanical harvesting technologies across the four FAO-defined legume categories (soybeans, groundnuts, pulses, and fresh legumes); (2) studies presenting technical details on machine design, performance evaluation, loss mechanisms, and engineering challenges; (3) research on intelligent and autonomous harvesting systems, including sensor integration, machine vision, and robotic control; and (4) technical reviews or reports published by international agricultural organizations such as the FAO.
To improve the analytical structure and readability, all selected publications were categorized by crop type, technological development stage, and engineering challenge. The findings derived from these sources are synthesized and discussed in the subsequent sections.
Classification and harvest-related characteristics of legume crops
According to the Food and Agriculture Organization (FAO), legume crops are broadly classified into four major categories based on their agronomic use and physiological traits: soybeans, groundnuts (peanuts), pulses, and fresh legumes.
Soybeans (Glycine max) are primarily cultivated for both food and industrial purposes, serving as key sources of vegetable oil and protein meal (Table 2). Their upright growth habit, moderate pod height, and firm attachment make them well-suited for combine harvesting (Ndeke et al., 2024; Wang et al., 2025a; Zhang et al., 2020).
Table 2.
Classification and morphological traits of major legume crops affecting harvest efficiency.
Groundnuts (Arachis hypogaea), by contrast, develop their pods underground—a distinctive feature among legumes that demands specialized machinery capable of soil excavation, pod lifting, and separation (Dayananda and Lokesh, 2025; Srinivasa et al., 2022).
Pulses, including dry peas, lentils, chickpeas, dry beans, and faba beans, are grown mainly for their dried seeds used in food and feed. Generally, their low pod placement and fragile pod structure increase the likelihood of breakage and field loss during mechanical harvesting (Mesquita et al., 2006). However, significant morphological variations exist within this group. Chickpeas (Cicer arietinum) typically exhibit an erect growth habit. For efficient direct combining, research indicates that a lowest pod height of at least 15-20cm is required to minimize cutterbar losses, necessitating robust threshing mechanisms for their woody stems (Gupta et al., 2015; Petrova, 2021; Vishnu et al., 2020). Lentils (Lens culinaris) are characterized by a short stature and dense branching habit (Sejgaya, 2018). Research indicates that the height of the first pod is often critically low, which poses significant challenges for mechanical harvesting due to the risk of leaving pods unharvested (Ouji et al., 2021). This morphology, combined with a high tendency to lodge, necessitates specialized equipment adjustments to minimize losses. Similarly, dry peas (Pisum sativum) exhibit significant diversity in pod shape (Ellis et al., 2021), which can influence threshing dynamics, but their primary constraint remains the prostrate growth habit which limits mechanical harvest efficiency (Parihar et al., 2020). Dry beans (Phaseolus vulgaris) present a choice between harvesting methods based on architecture; while bush-types with higher pod clearance allow for direct combining, vine-types often require undercutting and windrowing to mitigate losses caused by uneven maturity and low-hanging pods (Checa and Blair, 2008; Zdravković et al., 2003). Fresh legumes, such as green peas and green beans, are harvested in their immature stage, requiring gentle handling to preserve tenderness, appearance, and nutritional quality (Bhattacharya and Malleshi, 2012; Lee, 2021). Faba beans (Vicia faba), distinct from other pulses, possess tall, sturdy stems and high pod placement, making them suitable for direct harvesting; however, their large seed size requires careful optimization of threshing clearances to prevent seed coat damage (Metwally et al., 2014).
The morphological and physiological diversity across these groups directly influences their harvestability (Mesquita and Hanna, 1995; Kuzbakova et al., 2022). Variations in plant height, branching pattern, stem rigidity, and pod attachment strength determine how easily each crop can be cut, lifted, or threshed. Crops with low pod placement or weak stems are more susceptible to ground loss and mechanical damage, while those with upright and compact canopies are better adapted to conventional combine harvesters (Mesquita and Hanna, 1995; Rębilas et al., 2020). Differences in pod maturity, moisture content, and canopy density further affect threshing efficiency, separation performance, and overall harvest quality (Kluver, 2010; Chandra et al., 2024).
Understanding the interaction between plant architecture, pod position, and mechanical harvesting performance is essential for developing optimized harvesting systems. Each legume group requires specialized engineering solutions, such as flexible headers, adjustable pickup reels, and low-damage conveying and separation mechanisms, to ensure efficient harvesting with minimal loss and high product quality.
Development and evolution of legume harvesting machinery
The development of legume harvesting machinery represents a gradual yet continuous transformation from labor-intensive manual methods to highly efficient and intelligent systems. In the early stages of agriculture, harvesting depended entirely on human labor, involving hand-pulling, cutting, or beating plants to release seeds. While adequate for small-scale farming, these methods were slow, inconsistent, and caused considerable pod loss (Chaudhari and Jha, 2017).
As cultivated areas expanded and the demand for efficiency increased, mechanical devices were introduced to reduce labor requirements and human drudgery. Farm mechanization, particularly during peak seasons such as harvesting and threshing, became essential to address labor shortages and rising wage costs. Mechanized threshing systems were promoted to improve post-harvest handling and minimize losses. However, early mechanization efforts faced substantial challenges due to the limited adaptability of machines to the diverse morphologies of legumes. Many pulse crops have indeterminate growth patterns, uneven pod maturity, and fragile stems or pods, which complicated mechanical harvesting and limited uniform performance (Reddy, 2009; Metwally et al., 2014; Kumar, 2022).
To address these limitations, researchers and manufacturers gradually developed integrated harvesting systems capable of performing multiple operations such as cutting, conveying, and threshing in a continuous sequence. These early reaper–thresher combinations served as the foundation for more advanced and automated designs, bridging the gap between semi-mechanical tools and fully mechanized systems. This transitional phase played a key role in improving field-scale harvesting efficiency and operational consistency (Choi et al., 2017).
The progression of these advancements is visually summarized in Fig. 2 which illustrates the chronological timeline of legume harvesting technology evolution from manual to intelligent systems.
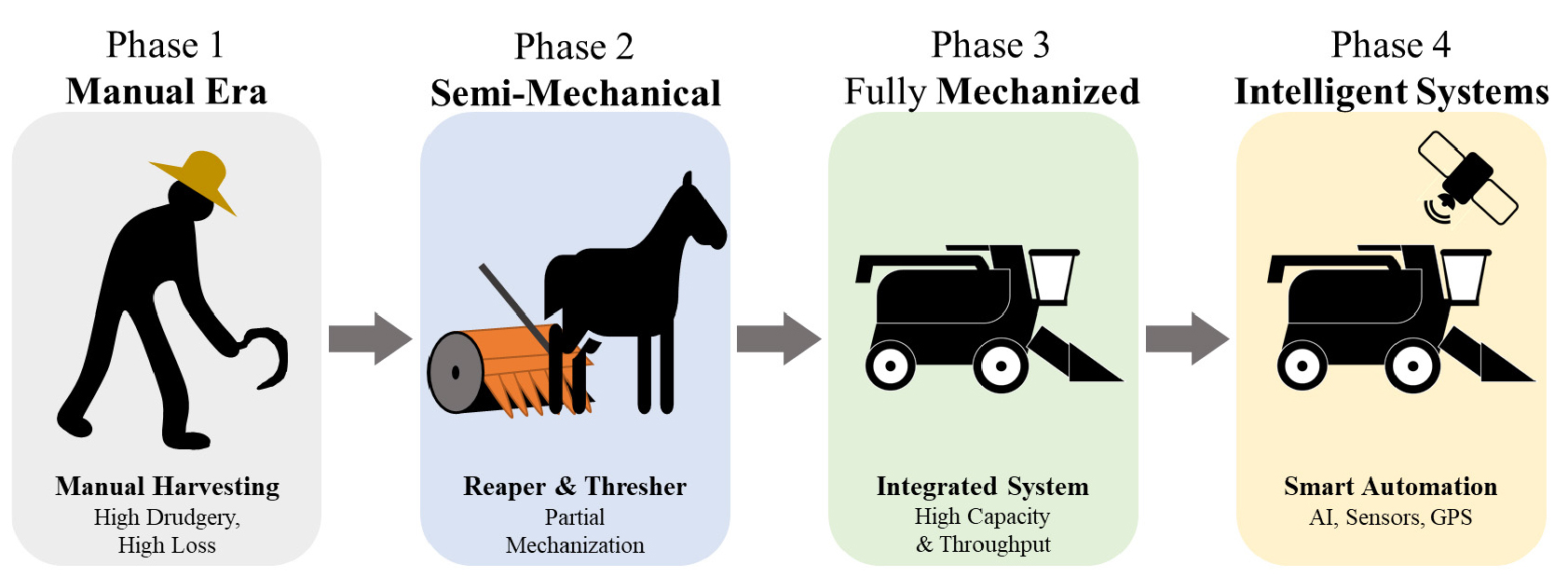
The introduction of combine harvesters represented a major step toward complete mechanization. These machines combined cutting, feeding, threshing, separation, and cleaning into a single operation, significantly improving throughput and grain uniformity. Legumes such as soybeans, chickpeas, and dry beans were among the first to benefit from the use of specialized headers, adjustable reel speeds, and optimized threshing mechanisms that reduced shattering and cracking (Ahmad et al., 2023). Conversely, groundnut harvesting technology advanced along a different path, with digger–shaker–inverter systems developed to efficiently lift pods from beneath the soil surface (Azmoodeh et al., 2014; Saakuma et al., 2016). In recent decades, legume mechanization has entered a new phase characterized by automation and precision control. Modern harvesters now integrate GPS guidance, machine vision, and multi-sensor systems that automatically adjust operational parameters such as header height, reel speed, and threshing intensity according to field variability (Ah and Lee, 2025). Real-time feedback enhances control and efficiency, reducing losses and improving overall product quality. This technological evolution demonstrates how agricultural machinery design has continually adapted to the biological and structural diversity of legume crops. As detailed in Table 3, specific machinery has been developed to address the unique physical characteristics and limitations of different legume categories. However, a fundamental engineering challenge persists across all legume harvesting systems: balancing high throughput with low seed damage and field loss. Conventional tangential threshing combines, which use a rasp-bar cylinder and concave system, achieve high processing capacity but tend to increase impact forces on fragile seeds such as soybeans and pulses. This often leads to cracking and shattering, particularly when moisture content falls below 13% (Mesquita and Hanna, 1995; Ahmad et al., 2023). In contrast, axial-flow threshing systems extend crop–thresher contact time while distributing impact forces more evenly along the rotor axis. This results in gentler separation and reduced seed breakage, although these systems often require higher power input and careful adjustment of rotor speed and concave clearance to maintain productivity (Gupta et al., 2015; Vishnu et al., 2020). In the case of groundnuts, the trade-off manifests differently. The standard two-stage digger–shaker–inverter system minimizes in-field losses by controlling pod detachment force, but the intermediate drying step limits overall throughput compared to fully integrated harvesting systems. Efforts to develop single-pass peanut combines have improved efficiency but often at the cost of increased mechanical damage due to soil abrasion and pod compression (Saakuma et al., 2016). In pulses, where pods are delicate and positioned close to the soil surface, designers employ low-speed threshing cylinders and stripper headers to reduce impact. Yet, these adaptations inherently slow material flow and reduce field efficiency (Parihar et al., 2020; Chandra et al., 2024). Consequently, pulse crops are particularly sensitive to the throughput–damage dilemma, where each incremental gain in harvesting capacity increases the risk of shattering. For fresh legumes, such as green peas and green beans, the focus shifts entirely toward maintaining pod integrity and visual quality. Specialized mobile viners and pod pickers employ flexible conveying elements, low-frequency beaters, and cushioned collection bins to reduce bruising, deliberately sacrificing throughput to ensure product quality (Bhattacharya and Malleshi, 2012). Ultimately, this trade-off reflects a universal engineering principle in legume mechanization: the optimization of kinematic parameters—cylinder speed, rotor pitch, reel velocity, and feed rate—to reach an equilibrium point where throughput efficiency and product integrity coexist. Future developments are increasingly relying on sensor-driven adaptive control, combining torque, vibration, and vision data to automatically modulate operating parameters in real time, thereby mitigating this fundamental conflict across diverse legume categories.
Table 3.
Comparison of harvesting systems by crop type, showing applicable machinery, key features, and limitations.
Harvesting Mechanization by Crop Type
Soybeans
Soybeans are highly susceptible to cutting, shattering, and breakage losses during mechanical harvesting due to their lowest pod height being close to the ground and the high brittleness of the pods. These characteristics necessitate high ground-following capability of the header, impact reduction in the conveying system, and precision control of the threshing and cleaning sections. Globally, soybean harvesting mechanization has evolved around specific functional improvements. The most critical component is header technology (Manitoba Pulse and Soybean Growers, 2020; Wang et al., 2024). Flex headers minimize cutting losses—even in varieties with low pod heights—by utilizing a cutterbar that moves independently to follow ground contours. Major manufacturers like John Deere and Case IH in the U.S. have established lineups centered on large-scale flex headers (Jiang et al., 2025). In South America, flex and draper headers (e.g., GTS) are widely used to manage fields with significant unevenness. Draper headers employ belt conveyors to gently transport cut crops, reducing impact and friction to minimize shattering losses (Mesquita and Hanna, 1995). Recently, "Flex-Draper" headers, developed by companies such as MacDon and CLAAS, combine these advantages. They feature a flexible cutterbar for close ground contact and a belt system for low impact conveyance.
Conveyance and reel control technologies are also pivotal in soybean harvesting (Carreira et al., 2024; Ren et al., 2025). Automated systems adjusting reel speed and the reel-to-cutterbar distance reduce pod damage and enhance cutting efficiency; these are standard features in U.S. and European commercial combines (Leng et al., 2024; Schueller, 1989). Meanwhile, China is actively developing intelligent combines that integrate belt conveyance with high-speed autonomous driving for large-scale operations. Threshing and separation technologies vary by region. CLAAS emphasizes low-RPM, low-impact threshing structures. Conversely, China’s Lovol GM100 Plus and GK120 incorporate intelligent systems that control threshing clearance and travel speed based on real-time feed rate and loss data. Additionally, New Holland’s CH series focuses on high-capacity harvesting utilizing a high-airflow cleaning system.
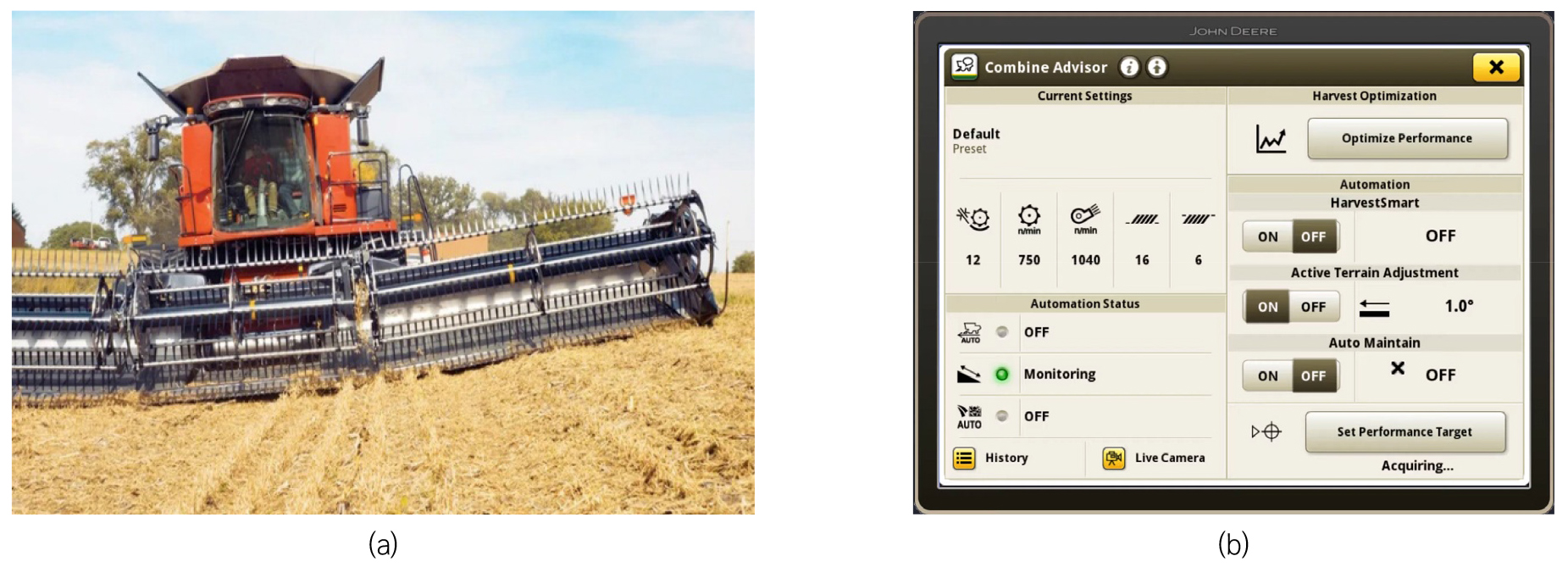
Recent advancements highlight intelligent control technologies. Systems like John Deere’s Combine Advisor and Active Yield Calibration analyze loss rates in real-time to automatically adjust fan speed, cleaning settings, and conveyor flow to optimize soybean quality (Meusel et al., 2018).
Groundnuts (Peanuts)
The most critical technology in peanut harvesting is the digging and lifting mechanism. In the U.S., this process is dominated by the ‘digger-shaker-inverter’ system (e.g., Kelly Manufacturing Corp., Amadas Industries), which excavates, cleans, and inverts plants for drying. While Europe utilizes smaller units for sloped terrains, China and India employ chain-type digging and spring-type shaking mechanisms to address varying soil plasticity. Notably, Lovol (China) has commercialized integrated 2-4 row digger-shakers for large-scale operations. Soil separation technology must balance cleaning efficiency with minimizing peanut pod damage. To achieve this, U.S. equipment uses fixed blades with variable shakers, China employs chain-type vibrating plates with adjustable tension, and Europe adopts low-vibration fine separation structures (Li et al., 2025). Peanut threshing, a key factor in loss rates, utilizes low-RPM horizontal rotors in the U.S. to minimize impact, whereas China employs steel-tooth drums with multi-stage concaves to maximize performance (Zheng et al., 2025).
Recent advancements for quality improvement include shock-absorbing pads, rubber-coated concaves, and intelligent fan speed control (Liao et al., 2025). Current trends focus on intelligent systems. China is advancing automatic steering and depth control based on soil moisture sensors (Chen et al., 2018; Gu et al., 2025a; Hu et al., 2022), while the U.S. prioritizes IoT-based automation for peanut drying and storage facilities (USDA ARS, 2017).

Pulses (Dry Peas, Lentils, Chickpeas, Dry and Faba Beans)
Pulse crops are prone to significant cutting, shattering, and breakage losses due to variable pod positions and high impact sensitivity (Golpira et al., 2021). Consequently, mechanization technology prioritizes ground-following capability, low-impact conveying, and low-RPM threshing. In major production regions like Canada and Australia, flex header combines equipped with Automatic Header Height Control (AHHC) and low-cut knives are standard. Specifically, Australia utilizes draper headers to minimize friction-induced shattering in dry climates (North Dakota State University, 2019; Riverine Plains, 2020). Threshing systems are tailored to crop characteristics. Fragile crops like lentils utilize low-RPM fixed drums and precision fans (e.g., CLAAS), whereas chickpeas and dry beans employ large-rotor high-power systems (e.g., John Deere S-Series, Case IH Axial-Flow) to handle tough stems (Golpira et al., 2021).
Recent advancements center on intelligent automation. Systems utilizing real-time loss sensors to automatically adjust concave clearance and fan speed are expanding (Jiang et al., 2025), particularly in Canada, to mitigate economic losses (Saskatchewan Pulse Growers, 2025). For small-to-medium scale operations, such as in India (a major chickpea producer), mini-combine harvesters are prevalent (Das et al., 2025). These machines are evolving to include rubber-coated drums and pulse-specific concaves to minimize seed damage (Global Agriculture, 2025; Kumar, 2023).

Fresh peas and fresh beans
Fresh peas and beans are characterized by extremely tender seeds and pods, making them highly susceptible to impact. Since cosmetic appearance determines market quality, low-impact harvesting technologies are essential to minimize surface scratching, breakage, and bruising. Consequently, mechanization for these crops has evolved into a system focused on low impact cutting and conveying. In major cultivation regions like Europe (UK, France, Netherlands) and the U.S. Northwest, dedicated commercial harvesters from manufacturers such as Bourgoin, PMC Harvesters, and Oxbo are prevalent. These machines utilize low-speed rollers and belt-based conveying systems to minimize damage. Specifically for fresh peas, vine management technologies like pruning and vacuum assist are integrated to prevent hair-pinning caused by long vines.
Green bean harvesters feature an integrated structure for harvesting and sorting. To minimize scarring and cracking while meeting strict shape criteria, these machines adopt roller-type low-impact separation, low-speed pickup, and soft-pad packing systems. Furthermore, operating speed is a critical determinant of surface damage in fresh-pea and green-bean harvesting, with slower forward and conveying speeds significantly reducing bruising and cosmetic defects (Findura et al., 2013). Unlike dry pulses, the standard practice for fresh market crops involves harvesting whole pods followed by post-harvest shelling or grading at a facility, rather than in-field threshing. Recent advancements utilize vision-based quality detection, sensor-based damage monitoring, GPS/RTK path optimization, and soft-grip conveyors to ensure quality and reduce labor (Belan et al., 2019).
Current challenges in legume harvesting
Harvesting of legumes is influenced by a combination of biological, environmental, and engineering factors that collectively determine the recoverable yield and product quality. This section reviews recent studies addressing these constraints and their implications for machine performance and harvesting reliability. Although substantial progress has been made in the design of combines and threshing systems, current legume harvesters still face several challenges because most headers, threshing units, and operating configurations were originally developed for cereals rather than for legumes with low pod height and fragile pod structures. Kumar et al. (2019) demonstrated that pod loss and seed damage increase significantly when threshing and travel speeds deviate from the optimal operating range, indicating that operators often struggle to maintain stable performance under variable crop loads. Similarly, Stefanoni et al. (2022) reported that conventional rigid headers cause substantial impact-related losses, while optimized flexible or air-assisted headers can reduce shattering, emphasizing the need for structural redesign of harvesting components to improve performance and reliability.
A major engineering constraint remains within the threshing and separation system. As Gou et al. (2025) suggested, conventional cylinder–concave configurations still produce excessive grain loss, seed breakage, and clogging when crop flow or moisture conditions fluctuate. This occurs because the internal structure of these components was not originally designed to accommodate the physical and aerodynamic properties of legumes, which differ markedly from cereals in terms of seed mass, pod stiffness, and moisture response. Redesigning threshing and concave assemblies to match legume biomechanics is therefore an imperative factor for stable harvesting performance. Instability in these systems reduces recoverable yield, causes downtime from clogging, and delays field preparation for subsequent crops. Strengthening this engineering aspect directly contributes to production stability and sustainable mechanization.
Another critical factor affecting harvesting efficiency is the feed rate and its real-time control. Comprehensive studies on feed-rate detection (Yang et al., 2025) have shown that pressure, torque, and power signals measured inside the harvester fluctuate substantially under dusty and vibratory conditions. This signal instability restricts the development of reliable feedback control for cutting load, conveying rate, and separation performance. Likewise, vibration and acoustic analyses during threshing indicate that mechanical fluctuations propagate throughout the combine body, influencing separation efficiency and grain purity (Yilmaz and Gökduman, 2020). These observations highlight that mechanical stability and sensing reliability are closely intertwined, suggesting that improvements in signal filtering, vibration damping, and structural isolation are essential for achieving consistent operation.
A deeper challenge lies in the interaction between plant architecture, agronomic management, and sensing performance, particularly for crops with low pod placement. While engineering innovations in header design—such as floating or flex-draper mechanisms—help reduce ground losses, the underlying limitation extends far beyond hardware. Pod height is primarily determined by genetic and agronomic factors, including varietal traits, sowing density, and water availability, which influence stem elongation and canopy uniformity (Kuzbakova et al., 2022). Consequently, many legumes produce pods below the effective cutting clearance of standard headers, making them structurally inaccessible even under optimal machine settings (Kumar et al., 2019).
At the same time, intelligent sensing systems-including ultrasonic, LiDAR, and vision-based ground-following mechanisms-face their own technical limitations. Under field conditions, dust, vibration, and topographical irregularities introduce noise and latency to sensor data, degrading the accuracy of automatic header height control and feed-rate estimation. These sensing instabilities, coupled with biological variability in plant height and stem stiffness, cause frequent undercutting or missed pods, leading to increased shattering and reduced harvest efficiency (Yang et al., 2025). Therefore, the issue of low pod harvestability represents a multi-domain challenge, arising from the convergence of biological morphology, agronomic variability, and sensor-mechanical feedback limitations, rather than from header design alone.
Furthermore, variations in plant mechanical properties impose additional physical constraints. Telangi et al. (2025) demonstrated that variations in stem diameter and moisture content strongly influence cutting force and bending resistance, both of which vary within a single field as plants mature unevenly. This variability disrupts uniform feeding into the cutterbar and increases the incidence of uncut stems or cracked pods during threshing. Because these characteristics stem from growth habit, branching pattern, and reproductive node position, future machinery design must integrate biological variability into engineering solutions through adaptable cutting and flexible feeding mechanisms.
Beyond biological and mechanical constraints, environmental conditions also critically affect legume harvesting performance. One notable factor is dew formation, which restricts workable harvesting hours. Tryhuba et al. (2019) modeled dew formation dynamics using time-dependent humidity and temperature data, revealing that fluctuating microclimates substantially shorten the period during which harvesters can operate without slippage or seed loss. Furthermore, traditional harvest scheduling practices often ignore these temporal variations, leading to inefficient field utilization and uncoordinated machine deployment.
Taken together, these studies reveal that improving legume harvesting performance requires a systems-level perspective—integrating advances in plant breeding, agronomic management, mechanical engineering, and intelligent sensing. Only through such interdisciplinary optimization can harvesting systems achieve both high throughput and low seed damage while maintaining operational stability under variable field conditions.
Mitigation methods and future prospects
Recent studies on intelligent control and operation diagnosis suggests the future direction of legume harvester. Qiu et al. (2022) developed a performance prediction method for combine harvester that it stacked denoising autoencoders with a machine learning classifier and showed deep feature extraction from multi sensors can achieve the higher prediction accuracy of combine performance. Similar operation diagnosis She et al. (2024) proposed a meta transfer learning method for gearbox diagnosis with operating variables and Wang et al. (2025) reviewed structural failure detection of harvester and suggested imposing real time monitoring system with integrated maintenance strategies. The study determined key structural components of combine harvesters for enhancing the machine performance as header and feeding, threshing, cleaning, transmission, hydraulic, and main frame (Fig. 6). Moreover, the previous studies also reported that suggested system resolve the limitation of machine performance due to the harsh operating, nonstationary loads, and complex vibration (Wang et al., 2025). In perspective of time consuming, it is imperative for farmers to use their time effectively. Yang et al. (2022) formulated the excessive field assignment problem and used a modified whale optimization algorithm to minimize the total cost for travel and idle time indicating the worth of effective scheduling.
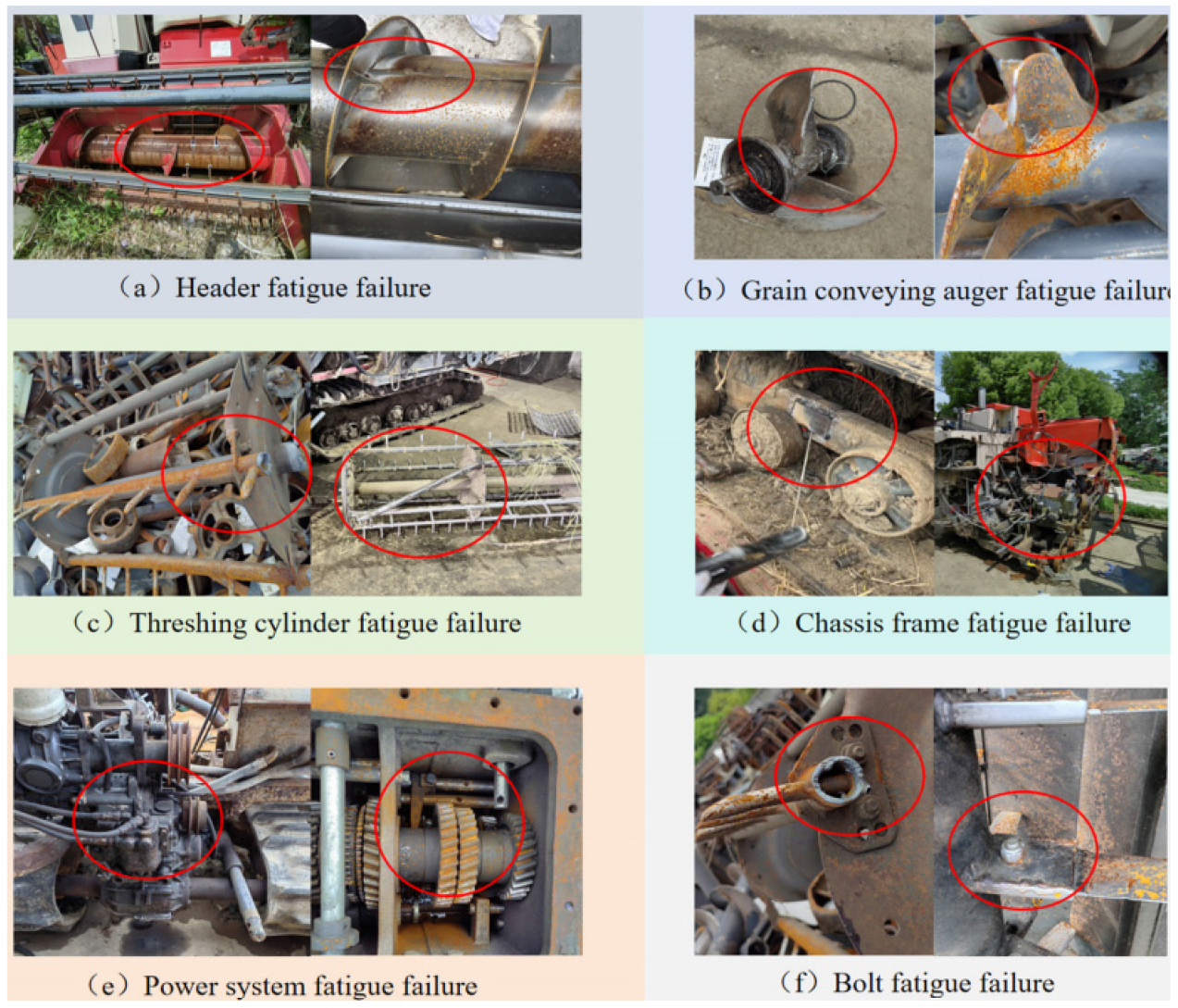
Fig. 6.
Examples of fatigue failure in various components of a combine harvester (the red circles indicate the specific locations of fatigue failure noted in each figure). (Wang et al., 2025).
The paradigm of robotic system also emerged into crop harvesting in experimental scale. Ah and Lee (2025) designed an AI robotic harvesting system for legume crops to distinguish soybean plants from weeds and to guide the system for precise operation. It resulted in a high operation accuracy that demonstrates the potential of vision guided selective harvesting to reduce dependence on manual labor and improve selectivity in dense canopies. Although the experiments rely on an image dataset and simplified test environment, it highlights the feasibility of combining crop recognition, path planning, and precise control for legume harvesting. Besides, the challenges in legume harvesting is not only focusing on mechanical system, but also minimizing the accumulated stress towards operator due to the excessive vibration exposure and contributions from long working time. Pradhan et al. (2023) developed a finite element model of a seated operator on a machine and simulated the vibration transmission from the machine to different body segments. The results show that specific combinations of structural stiffness, seat design, and operating sets can lead to unacceptable vibration levels. Further importance of minimizing the vibration was demonstrated through Singh et al. (2024) reports that redesigned an ergonomic seat substantially reduce vibration exposure to the operator. Through these studies, future harvesting systems should treat vibration and operator protection as design objectives on the equal level as capacity and loss rate.
Conclusions
The mechanization of legume harvesting has evolved significantly from manual practices to advanced intelligent systems. However, this review highlights that the diversity in crop morphology across the four major legume categories—soybeans, groundnuts, pulses, and fresh legumes—remains a critical constraint to uniform mechanical performance. While crop-specific technologies like flex-draper headers for soybeans and digger-shaker-inverters for groundnuts have successfully addressed certain challenges in large-scale production, significant gaps persist.
Current harvesters face persistent limitations, including high pod losses from low-podding crops on uneven terrain, mechanical damage due to rigid threshing components, and performance instability caused by varying crop and environmental conditions. Furthermore, existing sensor systems often lack reliability under harsh field conditions, and environmental factors such as dew severely constrain workable hours.
The future of legume harvesting lies in the advancement of intelligent mechanization. This requires integrating real-time monitoring systems that transition from unstable contact-based sensing methods to non-contact technologies such as 3D LiDAR and hyperspectral imaging. These advanced sensors, when combined with multi-sensor fusion and artificial intelligence, will enable real-time estimation of parameters such as feed rate and damage rate, and dynamically optimize critical operational settings like cutting height and threshing clearance. Such integration represents a transformative direction toward precision and autonomous legume harvesting.
Simultaneously, mechanical designs must evolve toward standardized, modular systems incorporating flexible and adaptive components to accommodate diverse crop morphologies. To realize this transition toward intelligent mechanization, we propose a strategic three-phase technological roadmap categorized by implementation timeline (Fig. 7).
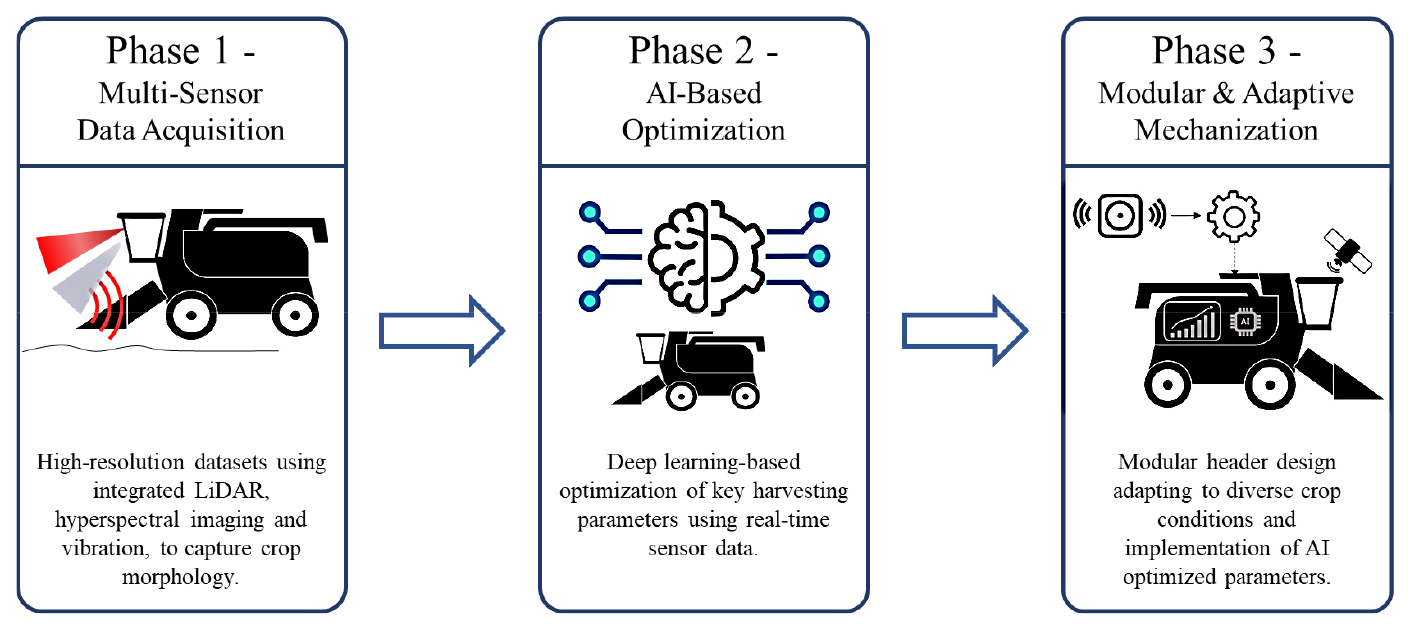
Phase 1 (Short-term) – Multi-Sensor Data Acquisition: Develop high-resolution datasets using integrated 3D LiDAR, hyperspectral imaging, and vibration sensors to capture crop morphology, moisture variability, and mechanical stress signatures during harvesting.
Phase 2 (Mid-term) – AI-Based Optimization: Apply artificial intelligence and machine learning algorithms to analyze multi-modal data for predictive control, enabling real-time optimization of operational parameters such as cutting height, feed rate, and threshing clearance.
Phase 3 (Long-term) – Modular and Adaptive Mechanization: Translate predictive models into physical design improvements by developing standardized, modular header and threshing units equipped with flexible joints, adjustable concaves, and self-adaptive actuators that respond dynamically to field and crop variability.
This stepwise approach bridges sensing intelligence with mechanical adaptability, forming a continuous feedback loop between data acquisition, decision-making, and hardware design.
It provides a clear pathway toward next-generation legume harvesters capable of sustainable, high-efficiency performance across diverse agronomic environments. Mechanical designs must evolve toward standardized, modular systems incorporating flexible and adaptive components to accommodate diverse morphologies. Ultimately, the next generation of legume harvesters will rely on intelligent, adaptive systems capable of learning from field data, predicting mechanical failures, and autonomously adjusting to diverse crop and environmental conditions. Achieving harmony between biological diversity and engineering adaptability will be essential to realize sustainable, precise, and efficient mechanization for global legume production.
