

Introduction
Materials and Methods
Description and selection of the transplanters
Modeling and simulation
Kinematic model of finger type and five-bar transplanting mechanism
Field test setup and performance evaluation
Results and discussion
Motion path analysis of the transplanters
Seedling damage rate
Transplanting efficiency and accuracy
Operational performance
Design improvements and future considerations
Conclusions
Introduction
Medicinal crop cultivation in Republic of Korea plays a vital role in both rural livelihood and national healthcare systems. A survey involving 406 medicinal crop farmers across 14 regions indicated that Korea is a leading producer of essential medicinal plants, including Angelica gigas, Rehmannia glutinosa, and Astragalus membranaceus (Lee et al., 2020). However, the survey also highlighted significant challenges related to cultivation expertise and the standardization of production practices. The expansion of Republic of Korea medicinal crop sector is increasingly supported by government-led initiatives and policy incentives aimed at enhancing global competitiveness. Strategic programs have been introduced to promote high-value medicinal species, strengthen research and development infrastructure, and foster sustainable cultivation practices. These measures are designed to meet growing domestic and international demand for medicinal plant products (Kim et al., 2020).
Despite its economic significance, medicinal crop cultivation remains predominantly labor-intensive, particularly in transplanting operations. This process requires high precision in seedling spacing, planting depth, and alignment to ensure uniform establishment and optimal root development (Abdulai, 2020; Ali et al., 2024a). Manual transplanting of medicinal crops can demand up to 184 labor hours per hectare, underscoring the substantial human effort required (Mohammod et al., 2024). The sector faces additional challenges due to the diminishing rural workforce caused by urban migration and escalating labor costs. Consequently, mechanization has become an urgent necessity to improve productivity, scalability, and long-term sustainability in medicinal crop farming (Son et al., 2020).
Mechanization offers a promising solution to address these challenges by enabling greater planting precision, reducing reliance on manual labor, enhancing operational efficiency, and contributing to potential yield improvements (Reza et al., 2025). Automated transplanting systems allow precise control over critical planting parameters like seedling depth, spacing, and arrangement, ensuring uniform crop establishment and optimizing ensuing growth conditions (Reza et al., 2023). Mechanization promotes agricultural sustainability by improving labor conditions, reducing manual workload, and lowering total production costs (Mohammod et al., 2024). However, current mechanized transplanters are largely designed for staple crops such as rice or vegetables and are incompetent to address the specialized agronomic requirements of medicinal plants, which typically exhibit fragile root systems and sensitive morphological structures requiring gentle handling during transplanting to avoid pressure and damage (Wang et al., 2024).
Existing mechanized transplanters present prominent challenges when applied to medicinal crop cultivation, primarily due to their robust and inflexible planting mechanisms. Available designs, while effective for sturdier crops, can inadvertently damage delicate medicinal seedlings, compromising their viability and growth (Liu et al., 2023). These machines also typically lack the precise control desired over planting depth, seedling orientation, and spacing, critical parameters for successful medicinal crop establishment. Furthermore, medicinal crop fields, often cultivated in raised beds with plastic mulching under diverse soil and environmental conditions, demand more adaptable machinery capable of efficiently handling these specialized cultivation practices (Wang et al., 2024). In light of these constraints, this research fills certain voids in existing transplanting technology for medicinal crop production, e.g., inadequate gentle handling of delicate seedlings, poor precision in control of critical planting parameters, and inadequate adaptability to changing field conditions. This calls for the development of a special transplanter tailored to medicinal crop characteristics.
To address these technological gaps and meet the increasing demand for mechanization in the medicinal crop sector, the objective of this study was to design, fabricate, and experimentally evaluate two transplanting mechanisms tailored for medicinal crop seedlings in Korea: (i) a finger-type mechanism with a circular planting trajectory to minimize seedling stress and ensure stable placement, and (ii) a double-crank five-bar linkage mechanism with an optimized elliptical trajectory to achieve high-speed and precise transplanting. Performance tests were conducted to compare the field applicability, accuracy, and efficiency of both mechanisms under practical Korean agricultural conditions.
Materials and Methods
Description and selection of the transplanters
Two mechanized transplanting systems were developed and evaluated to address the requirements of medicinal crop cultivation: (1) a finger-type transplanter for bare-root seedlings and (2) a double crank five-bar linkage transplanter for plug-type seedlings. Both were designed to reduce seedling damage while improving transplanting efficiency and accuracy. The finger-type system requires the operator to manually place seedlings into the rubber-coated finger grippers, which then rotate to guide and insert them vertically into the soil. A furrow opener prepares the bed, and a pressing wheel compacts the soil around the roots. Its simple structure and gentle handling make it suitable for medicinal crops with delicate root systems.
The five-bar linkage system, in contrast, uses dual cranks to drive a closed-loop kinematic mechanism. This enables the gripper on the end-effector to follow an elliptical trajectory, ensuring precise seedling delivery at higher speeds. A power transmission unit, furrow opener, and rear compaction assembly support its operation. The ability to dynamically control trajectory and angle provides higher throughput, making it more appropriate for larger-scale plots. Design parameters were set to ensure crop performance and field adaptability. Planting depth was maintained at 4.0 ± 0.5 cm, with row spacing fixed at 20 cm to match canopy width. Linkage dimensions and rotational speed were optimized to achieve 70–90 seedlings per minute while maintaining vertical orientation and minimizing oscillation during release (Li et al., 2019). These design choices reflect the physiological fragility of medicinal crops (Wang et al., 2024) and the loamy, sloped field conditions common in Korea (Cho and Nam, 2024; Frasconi et al., 2019).
Modeling and simulation
3D modeling
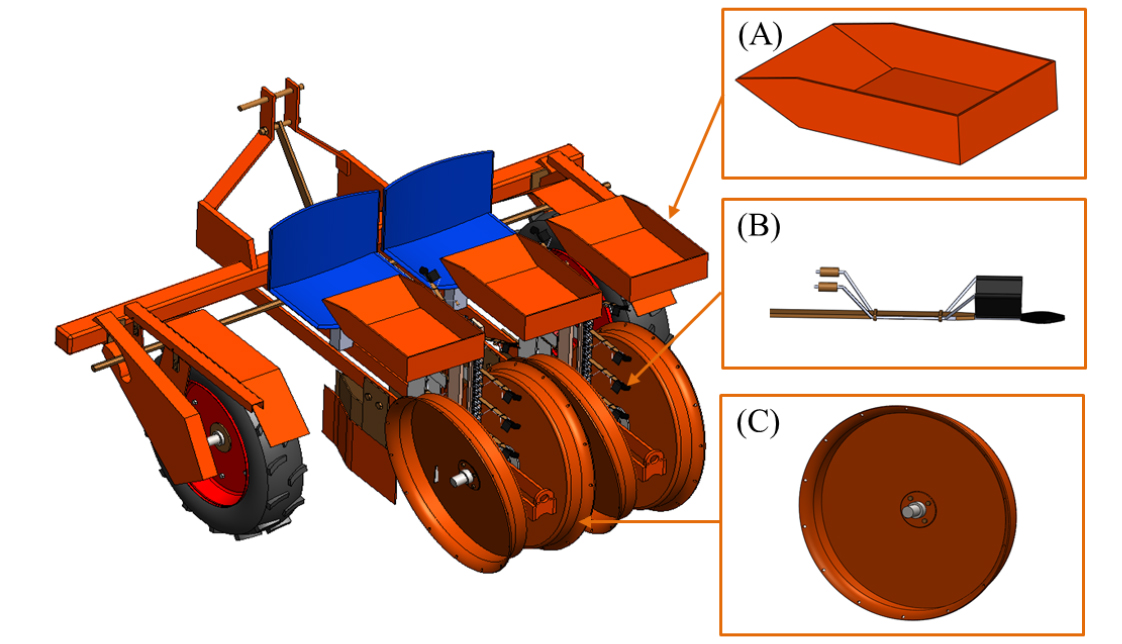
Three-dimensional (3D) computer-aided design (CAD) models of both transplanters were developed using a commercial mechanical design and simulation software (SOLID WORKS 2018, Dassault Systems SolidWorks Corp., Waltham, MA, USA). For the finger-type transplanter, the design emphasized optimizing the rotating disk assemblies and finger spacing to ensure synchronized movement and gentle handling of seedlings. The finger mechanisms were designed to minimize mechanical stress on the seedlings during pickup and placement. Fig. 1 presents the overall structure and key components of the finger-type transplanter.
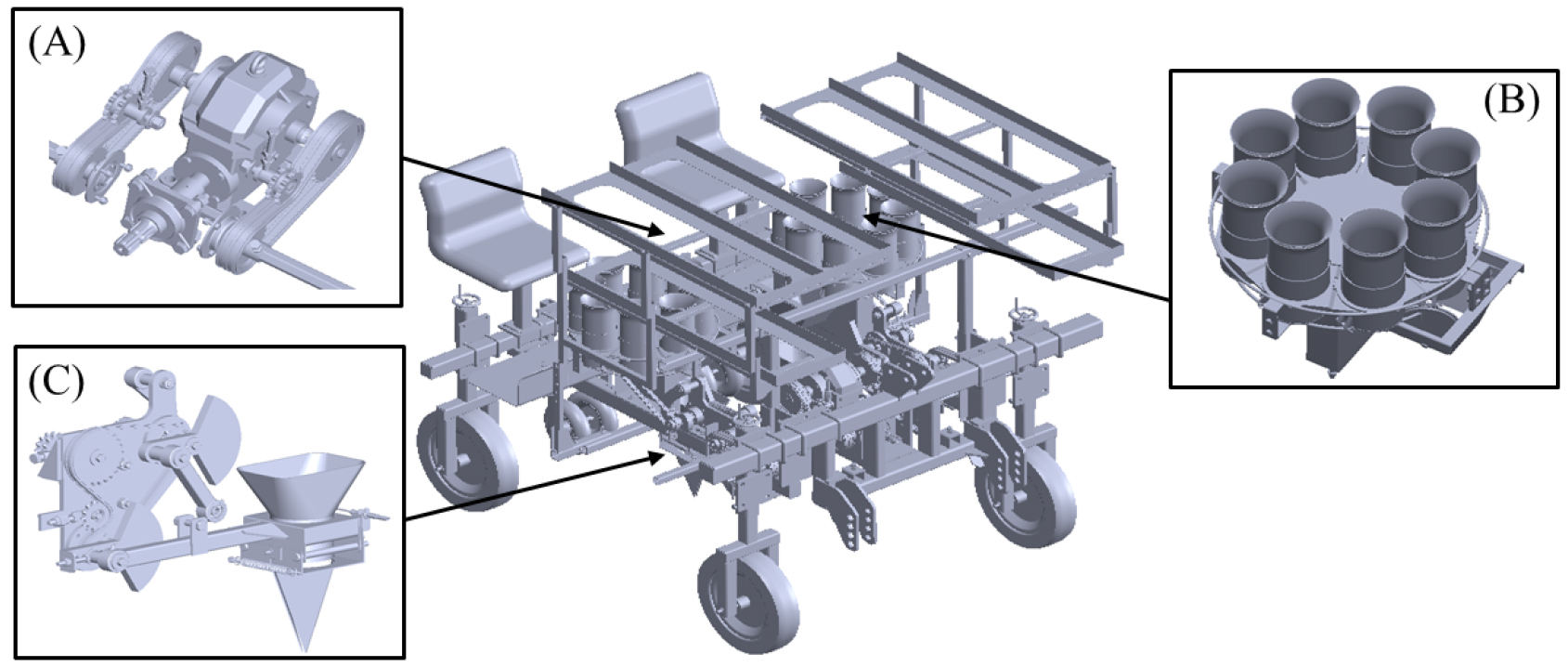
The five-bar transplanter model incorporated two rotating crank links connected to a pair of couplers driving a terminal gripper mechanism. This configuration aimed to achieve precise control over the trajectory of the gripper, enhancing the accuracy of seedling placement. As shown in Fig. 2, the system integrates three main subsystems: (A) the tractor PTO attachment and drivetrain, which transmit power to the planting unit; (B) the seedling feeder, where operators supply seedlings to the gripper; and (C) the planting mechanism, which places seedlings into the furrow and compacts the soil around them. This configuration provides stable power transmission, consistent seedling handling, and reliable planting depth under varying field conditions.
Working principle
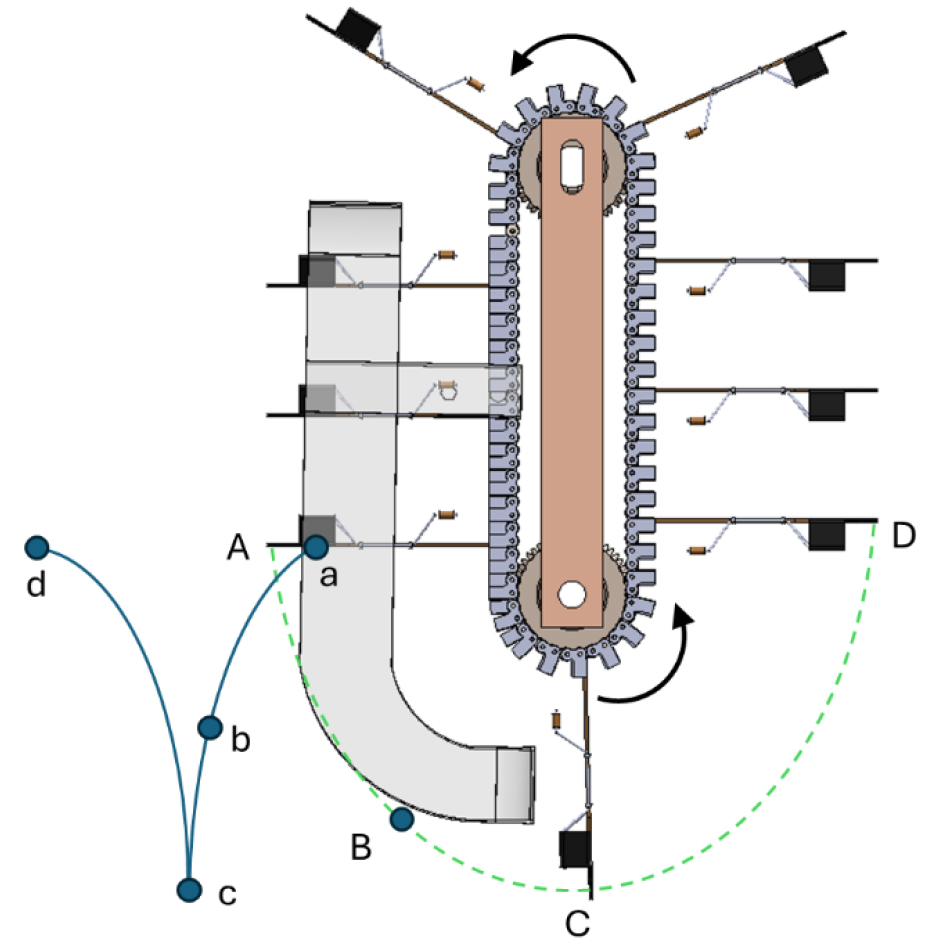
The transplanting operation involves four key phases: seedling pickup, transportation, placement, and soil compaction (Ali et al., 2024b). In the finger-type model, rubberized fingers grasp each seedling manually loaded onto trays. As the drive shaft rotates, seedlings are moved along a curved arc to the soil surface where they are vertically inserted. The rear compaction wheel stabilizes the seedling in place. The planting units were uniformly mounted along the transport chain using hinged connections. By adjusting the position of the fastening bolts, the effective length of each planting unit could be modified to suit varying operational needs. During the transplanting process, the driving mechanism transferred motion from the power source to the planting chain, which in turn rotated the planting sprockets and actuated the clamp-type planting devices. Both planting sprockets operated in synchronized motion to maintain uniform planting intervals. Fig. 3 provides a schematic diagram of the finger-type planting mechanism, illustrating the arrangement of its components and the functional flow of the transplanting process.
As the planter advanced, it entered the zone defined by dual guide slideways. Within this region, the downward pressure from the slideways caused the actuator (putter) to compress the rubber pads, allowing them to grip the seedling securely and prevent premature dropping. The movement of the planter from position A to B corresponded to the trajectory segment from point a to b, while movement from B to C followed the trajectory from point b to c, and from C to D corresponded to point c to d.
At position A, the planting clamps began entering the pre-opened seedling furrow. Upon reaching position B, the clamps disengaged from the slideways, and the actuator released pressure. At position C, the clamps opened, allowing the seedling to drop precisely into the planting furrow. Subsequently, a compaction wheel pressed the soil around the seedling roots, ensuring firm soil contact, which is essential for thermal insulation and moisture retention. By the time the planter reached position D, the transplanting cycle was completed, and the unit exited the furrow. This entire cycle then repeated in a continuous, automated fashion throughout the planting operation (Ji et al., 2024).
For the five-bar linkage system, the hopper picks seedlings from a tray mounted on a conveyor. The movement along a compound elliptical trajectory ensures the seedling is lowered at a controlled speed and placed at the desired depth. A cam-based timing control ensures synchronization between hopper opening and ground contact. According to Zhao et al. (2018), ensuring seedling verticality during release significantly reduces plant shock and root misalignment. Prior to the transplanting process, potted vegetable seedlings were loaded onto designated platforms positioned on either side of the machine. The transplanting system was tractor-drawn, relying on external traction to perform its operations. During forward motion, the machine simultaneously initiated the mulching process by laying plastic film, which automatically halted when the tractor stopped, ensuring synchronized control between mobility and film deployment.
As the transplanter moved, seedlings were gently extracted from the trays in a continuous manner and fed into the seedling transport mechanism in sequence. This mechanism conveyed the seedlings via a rotating assembly. Once a seedling reached the alignment above the guide hole, the spring-actuated diaphragm opened automatically, allowing the seedling to be released. After release, the diaphragm retracted under spring tension, securely gripping the next seedling in line.
The discharged seedling was accurately positioned above the planter receiving point through the guide hole. At this moment, the duckbill-type five-bar linkage mechanism rose to its uppermost position, aligning precisely to receive the potted seedling. As the linkage descended, the seedling was carried downward, and the cam-zipper assembly triggered the duckbill mechanism to open, facilitating controlled seedling placement into the soil.
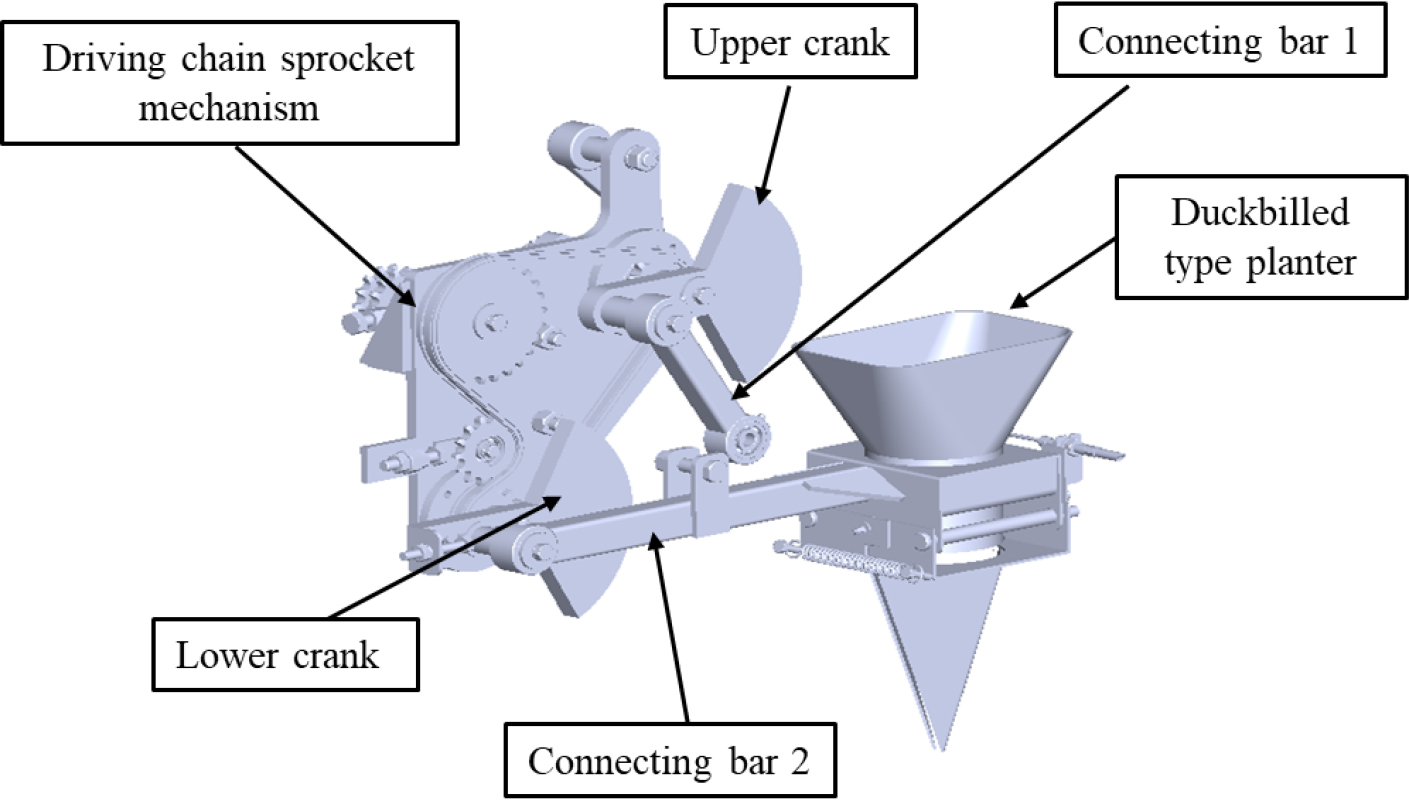
The planting operation was finalized by the action of the soil-filling and covering units, which ensured proper embedding and protection of the seedling. Once the duckbill mechanism cleared the seedling zone, it closed automatically and reset, entering the next transplanting cycle. This system enabled semi-automatic transplanting with coordinated mechanical efficiency. Fig. 4 illustrates the main components comprising the full double crank five-bar transplanting mechanism.
Kinematic model of finger type and five-bar transplanting mechanism
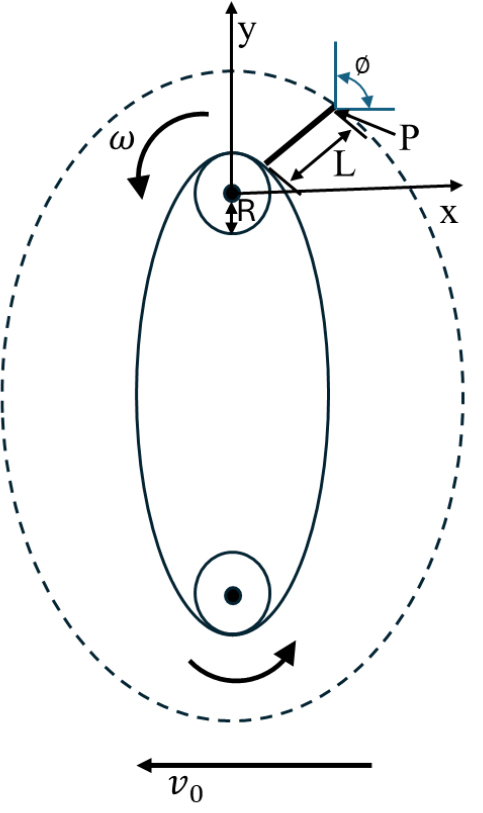
The finger-type transplanting mechanism performs a continuous rotary motion while the entire transplanter moves forward along a straight path. During the operation, the transplanting finger rotates about the center of a sprocket while simultaneously translating with the machine linear motion. To analyze the motion of the planting tip (denoted as point P), a two-dimensional coordinate system (Fig. 5) is established with the center of the sprocket as the origin. The position of point P, located at the lower end of the transplanting finger, can be mathematically described by the following parametric equations (Zhao et al., 2024):
Differentiating Equation (1) with respect to time yields the first-order velocity components of point P:
Subsequently, differentiating again with respect to time provides the second-order acceleration components:
In these equations, x and y represent the instantaneous Cartesian coordinates of the transplanting fingertip, designated as point P, measured in meters. The term denotes the constant forward velocity of the entire transplanting machine, expressed in meters per second (m/s). The parameter R refers to the radius of the circular path traced by the transplanting finger as it rotates about the sprocket center. The angular velocity of this rotation is denoted by ω, measured in radians per second (rad/s), and characterizes the rotational speed of the transplanting unit. Lastly,
L signifies the fixed distance between the rotational center of the finger mechanism and the lower endpoint P, representing the effective length of the transplanting finger.
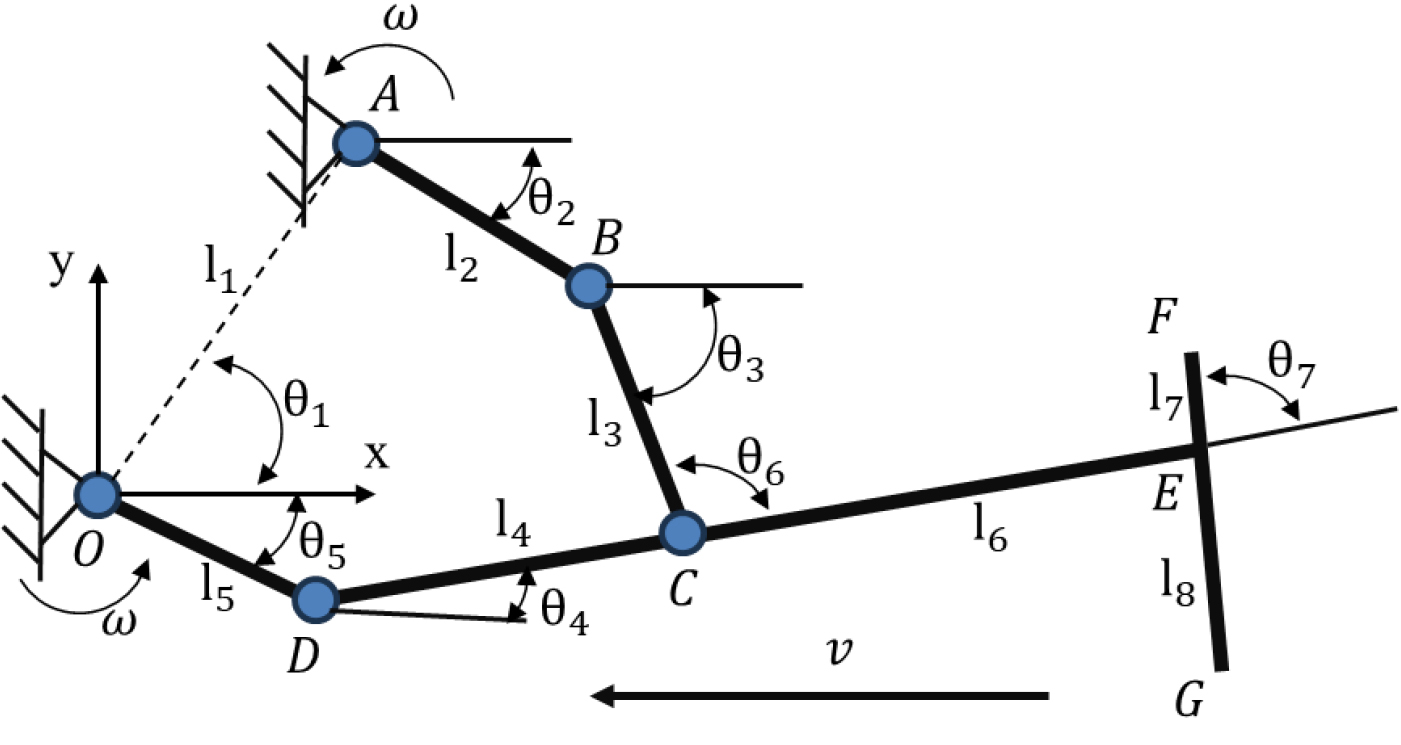
The kinematic model of the double crank five-bar transplanting mechanism (Fig. 6) was developed based on inverse kinematic principles. The position of the end-effector was determined as a function of the input crank angles and the respective link lengths using closed-form vector loop equations. Simulation results demonstrated that the end-effector trajectory closely approximated an elliptical path, exhibiting smooth transitions during the pickup and placement phases. However, when compared to the finger-type mechanism which follows a relatively circular trajectory the five-bar system displayed increased dynamic vibrations, particularly at crank angles exceeding 120°, as also reported by Wang et al. (2021).
The planting quality of transplanting mechanisms such as the duckbill-type transplanter is strongly influenced by both the motion trajectory and velocity profile of the planting end-effector. A critical strategy for improving the vertical placement accuracy of plug seedlings is the application of the zero-speed transplanting principle, in which the seedlings horizontal velocity relative to the ground is reduced to zero at the moment of insertion. This method, as highlighted by Chen et al. (2022), contributes to improved post-transplant seedling stability by reducing leaning and minimizing the risk of dislodgement.
The kinematic formulation was derived by first expressing the displacement of each joint in a relative coordinate system attached to the sprocket center. These expressions were subsequently converted into the absolute (ground-fixed) coordinate system through standard coordinate transformation, thereby ensuring consistency between the mathematical model and the schematic representation of the mechanism. The system is modeled as a single degree-of-freedom mechanism driven by the angular velocity ω. The link lengths are denoted as L1 through L8, and the angular positions relative to the x-axis are represented by θ1 through θ7. The displacement of the end-effector (point A) can thus be expressed as shown in Equation (1) (Timene and Djalo, 2023).
A rectangular coordinate system is used to describe the displacement of various linkage points within the mechanism. The displacement coordinates for point B are defined as:
Similarly, the coordinates for point B can be expressed as:
The coordinates for point D can be expressed as:
Applying the vector loop closure principle, the linkage loop equation is defined as:
Based on the above formulations, the displacement of point C is obtained as:
Given the known angles θ1, θ2, and θ5, the unknown angles θ3, and θ4 can be determined as:
Where:
By combining the relationships given in Equations (11) and (12), the angular position θ4 is derived as:
The displacement equation for point E can be written as:
For point G, the displacement equation becomes:
The velocity and acceleration of point G can be systematically derived by differentiating the position equations with respect to time. The first-order derivatives yield the instantaneous velocity components, reflecting both translational motion and the contribution of link rotations. The second-order derivatives provide the acceleration components, which can be decomposed into tangential and centripetal terms, thereby capturing the dynamic response of the mechanism under varying angular velocities.
The angular velocity of the system at point G is governed by the following equations:
Where: and , . Given, ,
The acceleration equation for point G can be derived as follows:
Finally, to achieve zero-speed planting, the transmission ratio of the chain drive system is adjusted so that the tangential speed of the duckbill mechanism at its lowest point matches the walking speed of the transplanter. The direction of this movement is reversed to maintain stationary seedling placement at the planting point, fulfilling the zero-speed planting condition.
Field test setup and performance evaluation
Seedling conditions and field test setup
Seedlings of Angelica gigas and Rehmannia glutinosa, as shown in Fig. 7 were cultivated in 72-cell plug trays for a standardized nursery period of 60 days, in accordance with established horticultural protocols. At 60 days after sowing (DAS), Angelica gigas seedlings exhibited uniform morphological characteristics, with an average crown diameter of 7.2 mm, leaf length of 4.7 cm, and leaf width of 4.2 cm. The root systems demonstrated well-developed architecture, characterized by substantial length, volume, and high tip density features associated with enhanced shoot vigor and transplant readiness, as previously reported by Park et al. (2025).
Similarly, Rehmannia glutinosa seedlings grown under the same conditions exhibited complete mat formation (100%) within the plug cells by 60 DAS, indicating robust root cohesion and uniform seedling architecture. Such morphological uniformity and structural integrity is essential for efficient tray extraction, minimizing mechanical damage during transplanting, and ensuring stable post-transplant establishment. These controlled propagation conditions were important for maintaining treatment consistency and enhancing the reliability of subsequent field performance evaluations.

Field tests for both transplanters were conducted at two different locations: a farmer’s field and a research institution field as shown in Fig. 8. These distinct locations allowed for the evaluation of the transplanters under both practical and controlled conditions. Several key parameters were monitored during the transplantation process, including planting time, row-to-row distance, plant-to-plant distance, seedling damage rate, and planting accuracy. Environmental parameters, such as ambient temperature (ranging from 20°C to 23°C) and relative humidity (65–70%), were recorded throughout the trials. These factors were considered for their potential impact on seedling viability and overall transplant success. To ensure operational consistency, experienced operators were employed, and standardized planting speeds were maintained for both transplanters throughout the tests.

Performance metrics
The performance of transplanting mechanisms is commonly assessed through indicators that reflect both operational efficiency and agronomic quality. Four primary parameters were considered in this study: transplanting speed, seedling damage rate, missed planting rate, and vertical alignment. Transplanting speed represents the operational throughput of the machine and reflects its capacity to meet field efficiency requirements. The seedling damage rate is critical for evaluating the extent of mechanical stress exerted on seedlings during handling, as excessive damage can reduce survival and establishment. The missed planting rate indicates the reliability of the transplanting process, quantifying the proportion of planting cycles in which no seedling is successfully delivered to the soil due to mechanical slippage, synchronization errors, or feeder malfunctions. Finally, vertical alignment (uprightness) characterizes the quality of seedling placement, as deviations from the vertical axis negatively affect early growth, root anchorage, and uniform canopy development. Together, these indicators provide a comprehensive evaluation framework for comparing transplanting mechanisms under field conditions.
Planting speed is a critical parameter that reflects the operational capacity of the transplanter, typically expressed as the number of seedlings planted per second. This metric is influenced by both the forward speed of the machine and the preset plant spacing. Higher planting speeds contribute to increased field efficiency but must be balanced with other factors such as accuracy and seedling handling. The planting speed () is calculated using the following equation (Vlahidis et al., 2024):
Where: is the planting frequency (seedlings/s), is the machine forward speed (m/s), and is the distance between seedlings along the planting row (m). This relationship assumes uniform spacing and consistent forward velocity. Excessively high values of may lead to reduced transplanting quality, including seedling misplacement and mechanical stress.
The seedling damage rate is an indicator of the transplanter’s mechanical gentleness and the effectiveness of its gripping or holding mechanism. Seedlings may be physically damaged during picking, transferring, or planting due to crushing, bending, or tearing. Damage can negatively affect root development and subsequent crop growth. The damage rate is expressed as a percentage of total seedlings handled (Feng et al., 2024):
Where, is the number of physically damaged seedlings, and is the total number of seedlings observed during testing. A lower DSR value is desirable, indicating more gentle handling by the transplanter. High damage rates may suggest design flaws in the seedling-holding mechanism or inappropriate operating speeds.
The missed planting rate represents the percentage of instances where seedlings were not successfully placed into the soil. This can occur due to issues such as improper seedling release timing, skipping by the feeder mechanism, or malfunction during delivery. Missed plantings result in uneven crop stands and reduced field utilization efficiency. The missed planting rate (MSR) is given by (Vlahidis et al., 2024):
Where, is the number of missed seedlings (gaps in planting), and s is the total number of planting attempts or seedlings processed. A low MSR indicates reliable feeding and releasing mechanisms. In precision agriculture, minimizing missed plantings is essential for uniform crop development and yield optimization.
Transplanting accuracy is a composite metric that reflects the overall precision and quality of the planting process. It considers multiple planting defects, such as exposed seedlings (where roots are not fully buried), lodging (where seedlings fall over), leakage (empty planting positions), and replanting (two or more seedlings placed in one position). These defects can severely affect plant establishment and final yield. Transplanting accuracy (L) is calculated as (Ji et al., 2024):
Where, n1 is the exposed seedling rate, Lodging was defined as seedlings with an inclination angle greater than 60° relative to the vertical, with the lodging seedling rate (n2) expressed as the proportion of such seedlings among the total evaluated, n3 is the leakage or missed seedling rate, and n4 is the replanting (double-planting) rate. Each of these sub-metrics is expressed as a proportion of the total seedlings evaluated. The value of L represents the percentage of seedlings that were correctly transplanted under optimal conditions. A value close to 100% denotes high planting precision and effective machine performance.
Results and discussion
Motion path analysis of the transplanters
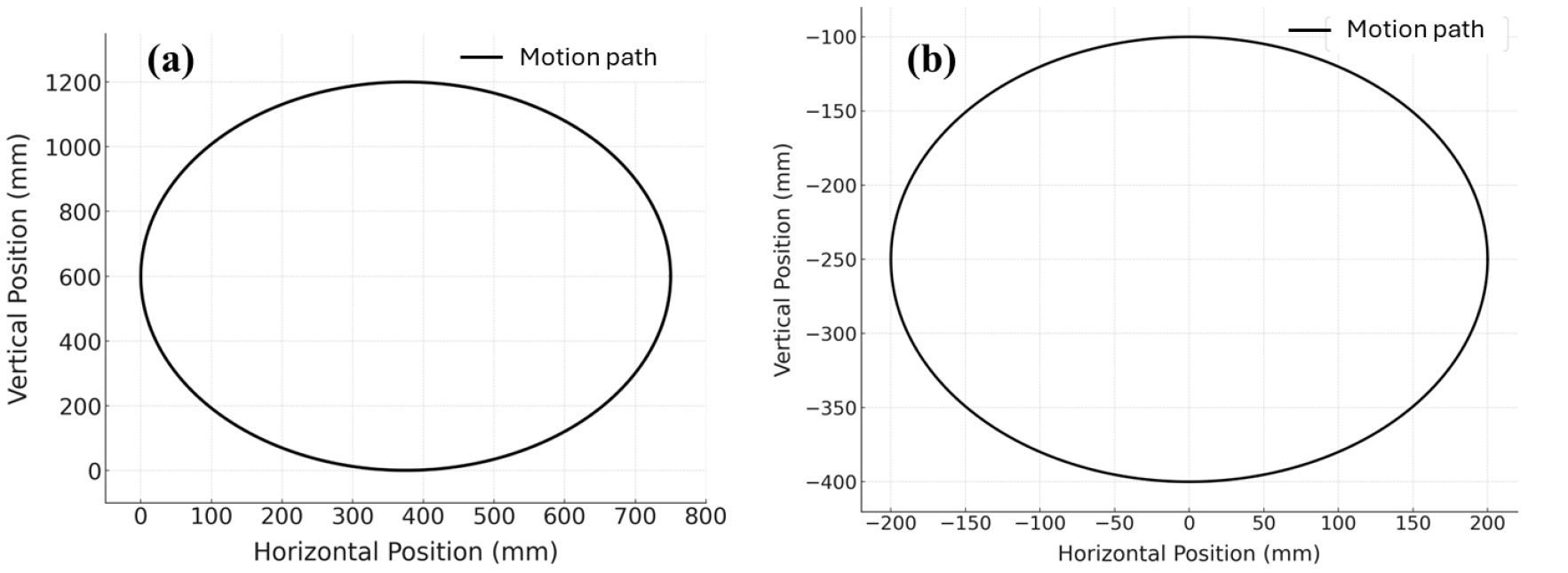
The motion path analysis of the transplanting mechanisms (Fig. 9) was conducted using software simulation of the kinematic model, which enabled visualization of the trajectories of the finger-type rotary and double-crank five-bar linkage mechanisms. With its wide circular motion path (0–750 mm horizontally; 0–1200 mm vertically), the finger-type rotary mechanism offers a vast operating envelope that enables gentle handling of seedlings with little lateral acceleration. The zero-speed planting paradigm, which reduces root displacement and mechanical stress during transplantation, is compatible with this smooth action because it makes controlled lifting and vertical placement easier. Because of these features, this mechanism is especially well-suited for delicate bare-root seedlings, where accuracy and minimal mechanical impact are essential.
Experimental results using a Tekscan pressure distribution device, which showed that contact pressure at the seedling interface greatly affects damage rates, support the significance of handling dynamics. In particular, a higher injury risk was linked to harsher impact surfaces and higher drop heights (Bai et al., 2022). By preserving steady contact forces and minimizing sudden impacts during seedling release, the finger-type mechanism slow, continuous trajectory probably reduces these dangers.
The double-crank five-bar linkage mechanism, on the other hand, is designed for synchronized, high-speed operations and follows a smooth, repeatable elliptical trajectory (-200 mm to +200 mm horizontally; -100 mm to -400 mm vertically). Similar mechanism prototype studies, like the ones used for transplanting Salvia miltiorrhiza, showed good performance with a 97.3% seedling qualifying rate, a 2.5% leakage rate, and exceptional depth and spacing consistency (Gaowei et al., 2018). These findings highlight the five-bar systems' accuracy and operational repeatability, which makes them perfect for automated transplanting settings and small row spacing.
The need for accurate trajectory creation for transplantation precision is shown by findings from kinematic modeling and mechanism design studies. For instance, a transplantation system powered by cam and noncircular gear was created to do four job poses with precise route control, providing great kinematic accuracy and a compact structural design (Sun et al., 2023). The benefits of less mechanical backlash, enhanced adaptability, and reliable performance in a range of field situations were further shown by the creation of non-circular gear-constrained 2R mechanisms for rice pot transplantation (Zhou et al., 2024). These results suggest that the operational situation should be taken into consideration when choosing between rotary and linkage-based techniques. The five-bar linkage works well for consistent, fast transplanting of plug-type crops, while the rotational mechanism is useful for delicate seedlings and deeper planting depths. Future developments might include adaptive control systems that adjust trajectory profiles in real-time depending on topography and seedling variability, as well as hybrid systems that incorporate the mechanical benefits of both.
Seedling damage rate
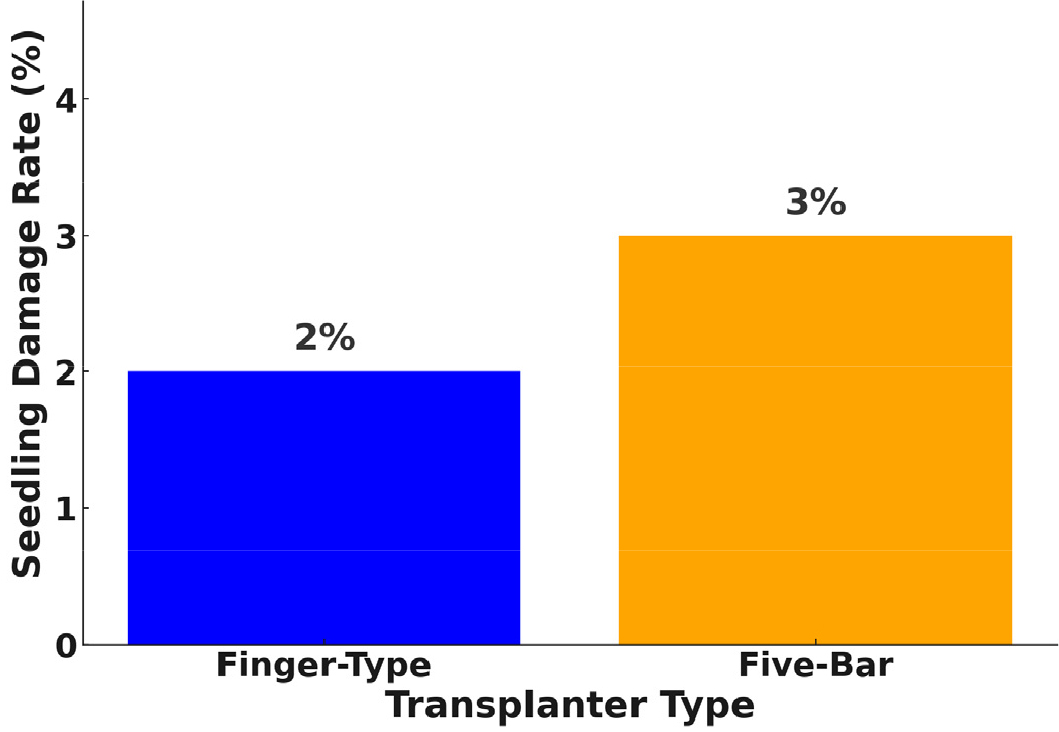
Field trial outcomes revealed that the finger-type transplanting mechanism resulted in a lower seedling damage rate (2%) compared to the five-bar mechanism (3%). This improved performance is primarily attributed to the gentle clamping action and controlled release dynamics of the finger-type system, which collectively minimize mechanical stress on sensitive seedling structures such as roots and stems. The reduced impact force and vibrational input during handling effectively mitigated physical trauma. In contrast, the five-bar mechanism, despite offering superior operational speed, subjected seedlings to higher mechanical loading due to abrupt clamping and release actions. These dynamic stresses likely contributed to increased incidences of bruising and structural damage. Fig. 10 shows the measured seedling damage rates for both transplanting mechanisms, supporting the conclusion that the finger-type system offers enhanced protection for delicate seedlings. These findings align with Zhao et al. (2018), who emphasized the importance of motion smoothness and release trajectory in mitigating transplant-induced stress.
Transplanting performance has been significantly improved by recent developments in planetary five-bar linkage systems with zero-speed insertion capabilities. With perpendicularity rates of 96% and injury rates of 0.5%, these mechanisms produce spindle-shaped trajectories that maintain planting accuracy while preventing harm to the mulch film (Jiaodi et al., 2016). These results imply that, especially for plug-type seedlings, well-designed linkage systems can provide both fast speed and delicate handling.
Transplanting efficiency and accuracy
The transplantation efficiency and accuracy of the two mechanisms finger-type and five-bar linkage exhibit a distinct trade-off between velocity and precision (Fig. 11). The five-bar transplanter functioned at an elevated transplanting frequency, effectively planting an average of 88 seedlings per minute, while the finger-type machine accomplished 72 seedlings per minute. This corresponds with previous studies indicating that linkage-based systems can attain elevated operational speeds; for example, gear-driven rotational dibbling mechanisms have been documented to efficiently plant up to 45 seedlings per minute (Habineza et al., 2023). Nevertheless, enhanced speed may compromise accuracy. The five-bar mechanism demonstrated a planting failure rate of 4%, but the finger-type device recorded a rate of 1%. This illustrates a recognized issue: high-frequency transplanting systems frequently encounter heightened timing and coordination problems, leading to greater occurrences of skipping or misplacement (Khadatkar et al., 2023).
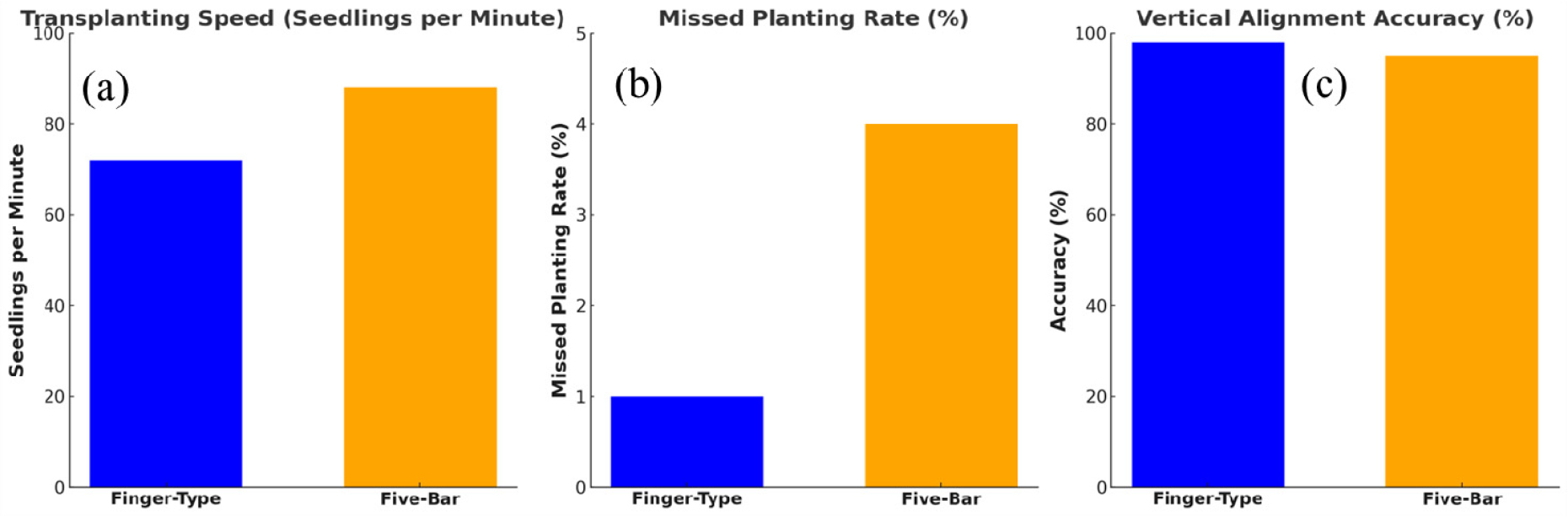
Vertical alignment is a vital factor for root formation and plant vitality exhibited more consistency in the finger-type mechanism, presumably owing to its smooth rotating motion and reduced planting cadence. This observation corroborates findings from high-speed transplanting prototypes that highlighted the necessity for consistent and synchronized movements to minimize misaligned insertions and damage. Successful systems operating at around 60 seedlings per minute acsuccess rates of 90%; nevertheless, any deviations in end-effector timing could jeopardize vertical alignment.
In automated systems employing five-bar pick-up mechanisms and PLC control, transplantation rates of approximately 90 seedlings per minute were attainable, with success rates approaching 88%, but leakage rates reached 16% (Khadatkar et al., 2023). Fully automatic transplanting machines, with extraction rates of 72 seedlings per minute, attained success rates of 94.9%, casting success of 98.5%, and minimal seedling injury rates (about 1.95%), underscoring the intricate balance between throughput and planting accuracy (Zhou et al., 2024). A mechatronic transplanter evaluated with nursery seedlings, including chili and tomato, attained transplanting efficiencies akin to manual techniques, achieving success rates of 91–95%. However, the transplantation rate was limited to 3 seedlings per minute with a single gripper, illustrating that slower systems can achieve high precision (Khadatkar et al., 2024).
Operational performance
The operational speed and mechanical frequency of both machines were assessed under uniform soil and seedling conditions. The five-bar mechanism, powered by a crank-driven linkage system, achieved higher mechanical throughput, making it ideal for time-sensitive field operations. However, increased speed correlated with elevated vibration, leading to a rise in seedling disturbance and planting inconsistency. The finger-type transplanter, while slower, displayed more stable behavior on uneven terrain and offered a simpler control interface. Operator fatigue was reduced due to its lower cycle rate and smoother machine feedback. According to Jin et al. (2020), such traits are essential for ensuring long-term reliability and ease of use in small- to mid-scale farms.
Field trials revealed several practical limitations inherent to each transplanting mechanism. The five-bar transplanter encountered synchronization issues between the rotating crank arms and the seedling delivery mechanism. These timing mismatches occasionally resulted in premature release or positional deviation of seedlings from the intended planting site. Additionally, mechanical stress from continuous high-speed operation led to vibration-induced loosening of structural bolts and accelerated wear on the gripper arms, necessitating more frequent maintenance interventions.
In contrast, the finger-type transplanter demonstrated greater mechanical stability and lower vibration, but presented ergonomic and operational challenges. Specifically, the manual seedling loading process limited automation potential and reduced the continuity of transplanting operations. Prolonged field use also contributed to operator fatigue due to repetitive tray handling and loading tasks. Post-transplantation assessments indicated instances of seedling misalignment and suboptimal uprightness, particularly in cases involving the five-bar transplanter. These effects are attributed to high-speed insertion dynamics and less controlled release trajectories. Fig. 12 illustrates typical misplanting cases and seedling posture deviations encountered after transplantation.

Design improvements and future considerations
The integration of vibration dampers, such as elastomeric pads or passive isolators, can markedly diminish high-frequency oscillations that may transmit via linkage components, potentially destabilizing the end-effector trajectory and undermining planting accuracy. Passive vibration isolation, utilizing materials such as rubber or foam, efficiently mitigates mechanically produced vibrations in analogous systems. Moreover, bio-inspired damping techniques, exemplified by “damping-by-branching” designs derived from tree limb architecture, have demonstrated the capacity to dissipate up to 30% of vibrational energy every cycle, presenting opportunities for slender linkage structures in transplanting equipment (Theckes et al., 2011).
Integrating real-time gripper force input is promising for preventing seedling damage and ensuring precision. A force-feedback gripper design utilizing elastic actuators exhibited a clamping success rate of 98.6–100%, characterized by consistent force detection and minimum variation in clamping strength. Likewise, grippers with flexible needle designs have demonstrated less substrate damage during planting (Li et al., 2022). These devices can be improved with closed-loop control that dynamically modifies clamping force during transplantation. Incorporating semi-automatic feeding systems in the finger-type rotary mechanism can diminish manual work and guarantee a steady supply of seedlings. Systems employing chain conveyors and timed actuators attained a throughput of 33–50 seedlings per minute, with a feeding accuracy of 98–99% under field circumstances (Kumar and Raheman, 2012). Fully automated conveying systems utilizing PLC-based synchronization and pressure or limit-switch feedback have demonstrated pushing mechanism error rates of roughly 2% and a placement success rate of 97.9% (Jin et al., 2018).
Selecting resilient, low-friction materials for rotary fingers, such as engineered plastics or coated metals, can improve grip consistency and minimize wear. Although literature on material optimization is few, general design principles for components advocate for the selection of materials exhibiting superior fatigue resistance and minimal friction to enhance service longevity. The results of this study aligned with previous research highlight the trade-off between transplanting speed and seedling handling delicacy. Compared to conventional single-bar or cam-type transplanters, the double crank five-bar model offers superior speed and mechanical sophistication but requires further refinement to match the accuracy and gentleness of the finger-type system.
Based on the comparative evaluation, the following recommendations can be made:
1.The finger-type transplanter is more suitable for bare-root medicinal crops where seedling integrity is critical.
2.The five-bar mechanism is ideal for large-scale plug seedling operations requiring faster throughput.
3.A hybrid transplanter combining the trajectory control of the five-bar with the delicate handling of finger-type arms could address the limitations of both systems.
Conclusions
This study successfully designed, modeled, and evaluated two transplanting mechanisms for medicinal crops: the finger-type and the double crank five-bar transplanter. The field trials revealed a clear trade-off between operational speed and transplanting precision. While the five-bar system demonstrated superior planting speed (88 seedlings/min), it recorded higher seedling damage (3%) and missed planting rates (4%). The finger-type transplanter, though slower (72 seedlings/min), excelled in accuracy and gentleness, with only 2% damage and 1% missed planting. The motion analysis showed that the five-bar linkage provides greater flexibility in trajectory control but introduces dynamic instability at high speeds. Conversely, the finger-type simpler rotational mechanism ensures smoother motion and better vertical placement consistency. These insights suggest that neither system is universally superior; rather, their application depends on crop sensitivity, field size, and labor availability.
Although the air temperature and soil moisture content were comparable across the experiments, the two mechanisms were evaluated in different fields; thus, the potential influence of environmental variability cannot be entirely excluded. A further limitation is that soil properties such as moisture content and cone index were not measured, and therefore the similarity of soil conditions between test sites could not be fully verified. Furthermore, as the definition of “damage” is a critical factor in evaluating performance using the Damage Recognition System (DRS), and no established guidelines currently exist in this domain, the absence of clear criteria should also be acknowledged as a limitation of the present study.
Future work should focus on integrating the strengths of both systems to develop a hybrid model that balances speed, precision, and handling delicacy. Incorporating automation in feeding mechanisms and feedback-controlled grippers could further improve performance. The study contributes to the advancement of mechanized solutions tailored for high-value, labor-sensitive medicinal crop cultivation in Korea and similar agricultural contexts.
