

Introduction
Materials and Methods
소형농업기계의 안정성 관련 설문조사
공시기계 및 센서 선정
Results and Discussion
소형농업기계의 안정성 관련 설문조사 결과
로타리 위치 및 작업환경별 작업자 위험성 평가
Conclusion
Introduction
한국의 농업 환경은 경사가 많고 지형이 불규칙한 특성을 지니며, 이러한 조건에서 소형 농업기계의 사용 시 안전 문제가 발생할 가능성이 높다. 특히 보행관리기와 같은 소형 농업기계는 가벼운 구조적 특성으로 기계 전복, 급정지, 돌 걸림과 같은 위험 상황이 빈번하게 발생한다(Hong et al., 2008). 농업기계의 보급이 확대됨에 따라 사용 증가와 함께 농업 현장에서의 안전사고가 점점 더 중요한 사회적 문제로 대두되고 있으며, 이에 대한 정량적 평가와 체계적인 연구가 시급하다.
행정안전부(2024) 통계에 따르면, 2020년에서 2022년까지 총 3,729건의 농업기계 관련 사고가 발생하였으며, 이로 인해 229명이 사망하고 2,482명이 부상을 입었다. 농업기계별 사고 중 보행 관리기와 경운기를 포함한 소형농업기계 사고가 전체 사고의 24%를 차지했으며, 이는 농업기계 중 가장 높은 비율이다. 특히 농업기계 관련 사고의 치사율은 일반 교통사고 치사율보다 9배 이상 높은 것으로 조사되었다.
최근 농업기계 작업자의 구성 또한 변화하고 있는데, 농촌 인구의 고령화와 함께 여성 농업인의 증가, 귀농, 귀촌 인구 유입이 두드러지면서 기계 조작 경험이 부족한 사용자의 비율이 크게 증가하고 있다. 이러한 작업자들은 기계 조작 미숙, 작업 중 예기치 않은 기계 반응, 안전장치 부족 등의 문제로 인해 전복이나 돌 튐, 신체 끼임 등과 같은 중대 사고에 더욱 취약하다(Kim, 2002; Ministry of the Interior and Safety, 2024).
또한, 보행 관리기는 본래 휴립 및 피복 작업을 목적으로 개발된 기계임에도 불구하고, 많은 농가에서 경운 및 쇄토 작업에 활용하고 있다. 하지만 관리기는 경운기에 비해 질량이 가볍고 무게중심이 높아 경사지 및 자갈이 많은 환경에서 작업 시 심각한 부상 위험을 초래한다. 특히 하우스와 같은 밀폐된 공간에서 단독 작업을 수행하는 경우, 기계가 작물이나 장애물에 걸려 사용자가 넘어지거나 기계에 끼이는 사고가 빈번히 발생하고 있다.
기존의 농업기계 안전성 연구는 대부분 대형 트랙터 및 콤바인과 같은 대형 농업기계를 중심으로 진행되었으며, 소형 농업기계, 특히 보행 관리기에 대한 정량적 안전성 평가 연구는 부족한 실정이다(Lee et al., 2022). 기존 연구들은 작업자의 경험 기반 평가나 실험실 테스트에 의존하는 경향이 높아, 실제 농업 환경에서의 기계 불안정성에 대한 정량적 분석이 부족하다. 따라서, 본 연구에서는 실제 농업 환경에서 보행 관리기의 안전성을 정량적으로 평가할 수 있는 새로운 방법론을 제시하고자 한다. 이를 위해 가속도계 및 자이로센서를 활용하여 작업 중 발생하는 기계의 동적 거동을 실시간으로 측정하고, 이를 통해 기계 전복, 급정지, 돌 걸림과 같은 위험 상황의 빈도와 강도를 분석한다.
본 연구의 목적은 보행관리기의 안정성을 정량적으로 평가하고, 작업 중 발생할 수 있는 위험 요소를 분석하는 것이다. 이를 위해 본 연구에서는 다음과 같은 구체적인 연구 목표를 설정하였다.
1)보행관리기의 위험 시나리오(예: 전복, 급정지, 돌 걸림 등)를 분석하고, 가속도 및 각속도 데이터를 기반으로 기계 불안정성의 주요 원인을 고찰한다.
2)전방 장착형과 후방 장착형 설정의 안전성 차이를 비교하여, 더 안정적인 구조를 도출한다.
3)작업 깊이 및 토양 조건(표준 토양 vs 자갈 토양)에 따른 기계의 안정성 변화를 분석하여, 농업 환경별 안전성을 평가한다.
4)소형 농업기계의 설계 개선 및 안전성 향상을 위한 실질적인 안전설계 및 운용 지침을 제안한다.
최종적으로, 본 연구에서는 소형 농업기계의 안전성을 향상시키기 위한 실질적인 데이터 기반 평가 기법을 제공하며, 이를 통해 기계 설계 최적화 및 안전 운영 가이드라인 수립에 기여할 것으로 기대된다.
Materials and Methods
소형농업기계의 안정성 관련 설문조사
본 연구에서는 소형 농업기계, 특히 보행관리기의 사용 현황과 안전성 문제를 체계적으로 분석하기 위해 설문조사를 실시하였다. 본 조사의 목적은 소형 농업기계 작업 중 발생할 수 있는 안전사고의 주요 원인을 규명하고, 실제 농업기계 사용자인 농업인의 경험을 바탕으로 안정성 문제를 평가하는 것이다. 이를 통해 소형 농업기계의 안전성을 개선하고, 농업 작업 환경에 적합한 안전 대책 마련을 위한 기초자료를 제공하고자 하였다.
설문조사의 대상은 충청남도 아산시농업기술센터 농업기계 임대사업소 이용자 40명으로, 보행관리기를 포함한 다양한 소형 농업기계를 사용하는 농업인을 대상으로 하였다. 설문조사는 2024년 10월 중순에 대면 방식으로 진행되었으며, 농업기계 안전사고 예방에 대한 경각심을 고취하기 위해 최근 농업기계 안전사고 사례에 대한 교육을 실시한 직후에 진행되었다. 설문 응답의 신뢰도를 높이기 위해 문항에 대한 사전 설명을 충분히 제공하였으며, 연구 목적과 조사 내용에 대한 사전 동의를 받은 후 응답을 수집하였다. 설문 데이터는 응답의 일관성을 검토한 후 분석에 활용되었으며, 불완전하거나 신뢰성이 낮은 응답은 분석에서 제외하였다.
설문조사는 농업기계 사용자들의 특성, 사용 경험, 안전성 개선 요구 사항을 체계적으로 분석하기 위해 세 개의 주요 파트(일반 정보, 농업기계 사용 경험 및 사고 사례, 농업기계 안전성 개선 요구사항)로 구성되었다.
1) 일반 정보
소형 농업기계 사용자의 계층적 특성을 분석하기 위해 성별, 연령대, 거주 지역, 주요 재배 작목, 농업 경력 등의 기본 정보를 수집하였다. 이를 통해 소형 농업기계를 주로 사용하는 농업인 집단의 특성을 파악하고, 특정 사용자 그룹에서 발생할 수 있는 안전성 문제를 규명하는 데 활용하였다.
2) 농업기계 사용 경험 및 사고 사례
응답자가 사용한 소형 농업기계의 종류 및 사용 빈도를 조사하고, 실제 경험한 안전사고 여부를 확인하였다. 특히, 기계 전복, 돌 튐, 급정지, 신체 끼임 등의 구체적인 사고 유형과 사고 발생 원인을 상세히 기록하도록 하였다. 또한, 아차사고(사고로 이어지지는 않았으나 위험했던 경험)까지 포함하여 기존 통계에 반영되지 않은 실질적 사고 데이터를 확보하였다. 이를 통해 기존의 농업기계 안전성 연구에서 간과되었던 위험 요소를 정량적으로 평가할 수 있도록 설계하였다.
3) 농업기계 안전성 개선 요구사항
농업기계 사고 예방을 위해 농업인들이 필요로 하는 구체적인 기술적 개선 요구를 조사하였다. 예를 들어, 관리기 로타리 작업 중 돌 튐 사고 방지를 위한 가림판 설치 필요성과 기계 충격 발생 시 자동 정지 기능을 갖춘 안전장치 도입 요구 등의 실질적인 개선 방안을 수집하였다. 이와 함께, 농업기계 사용자의 안전교육 필요성, 기존 교육의 효과성 및 개선 방향을 조사하여, 향후 농업기계 안전 대책 수립 시 반영할 수 있도록 하였다.
설문조사의 신뢰성과 중요성을 강화하기 위해 설문조사는 최근 사고 사례 기사와 안전교육 직후에 진행되었다.
공시기계 및 센서 선정
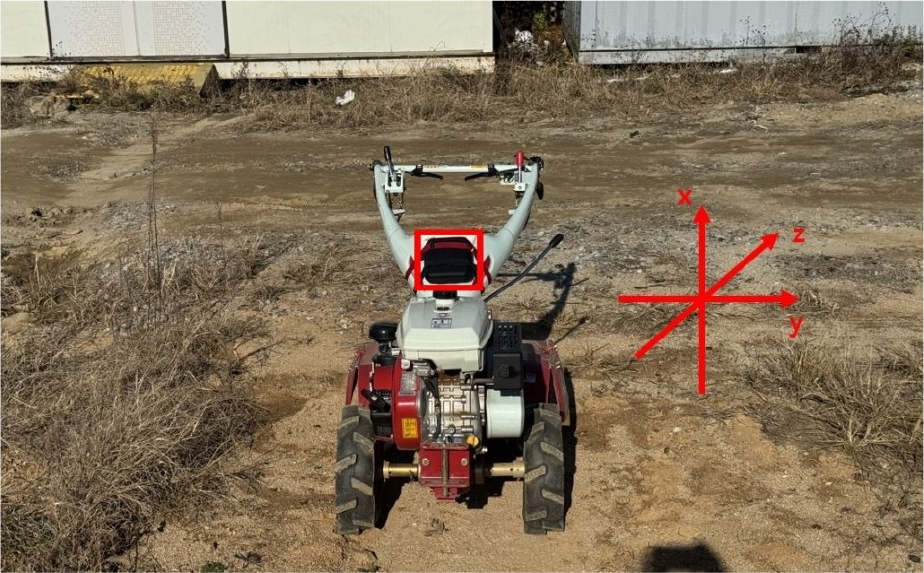
본 연구에서 사용된 관리기는 아세아 AMC-1000 모델(ASEA, Republic of Korea)로, 경사식 공냉식 OHV 4사이클 가솔린 엔진을 탑재하고 있다. 해당 모델은 로타리 포함 162 kg, 출력 7.0마력을 제공하여 경운작업과 같은 고부하 작업에서도 안정적인 동력을 공급할 수 있다. 작업기(로타리)는 중경제초기 RT-60 모델(ASEA, Republic of Korea)을 사용하였으며, 작업 깊이는 5~15 cm이다(ASEA, n.d.). 또한, 관리기의 로타리는 쇄토 작업 시 엔진 뒤에 장착되었을 때 바퀴와 동일한 방향으로 회전하도록 설계되었으며, 본 실험에서도 해당 설정을 유지하였다.
관리기의 주행 속도는 1단 전진(저속) 상태에서 약 1.8 km/h이며, 로타리작업 특성상 2단 주행은 안전상의 이유로 본 연구에서는 측정에서 제외하였다. 모든 실험 동안 작업자는 동일한 방식으로 기계를 조작하였으며, 엔진 회전 속도(RPM)와 센서 부착 위치도 동일하게 설정하였다.
실제 농업 작업 중 발생할 수 있는 위험 상황을 정량적으로 평가하기 위해 경운작업이 안된 자갈밭(거친 지면)과 고운밭(평탄 지면)이라는 실험 환경을 설정하였다. 그리고 각 환경에서 작업의 깊이(얕게와 깊게) 및 로타리 위치(전방과 후방)라는 변수를 조성하였다. 특히, 실험 환경 내에서 위험 상황을 효과적으로 유도하고 이를 정량적으로 분석하기 위해 숙련된 작업자가 경운 작업이 수행되지 않은 거친 지면에서 의도적으로 깊이 작업을 수행하였다. 이를 통해 기계의 불안정성을 극대화하고, 다양한 위험 상황에서의 기계 동작 데이터를 확보할 수 있도록 하였다.
또한, 실험 중 불필요한 진동이 측정 데이터에 영향을 주지 않도록 관리기의 핸들을 고정하고, 센서를 스펀지가 내장된 보호 케이스에 부착하여 측정을 진행하였다. 이를 통해 센서 데이터의 신뢰성을 높이고, 기계 자체의 움직임에 의해 발생하는 순수한 동적 변화를 분석할 수 있도록 하였다.
본 연구에서는 보행 관리기의 동적 특성을 실시간으로 측정하고, 다양한 위험 상황에서의 기계 반응을 분석하기 위해 스마트폰 기반(SM-G920S, Samsung Electronics, Republic of Korea)의 가속도계(accelerometer) 및 자이로센서(gyroscope)를 활용하였다(Table 1). 데이터는 100 Hz 단위로 sensor logger 애플리케이션을 활용하여 수집하였다(Fig. 1). 가속도 센서는 선형 가속도를 측정하여 기계가 돌에 걸리거나 급격한 속도 변화를 겪을 때 발생하는 데이터를 수집하며, 자이로센서(gyroscope)는 XYZ 축의 각속도를 측정하여 관리기의 기울기 변화, 회전, 전복 위험상황을 감지한다.
데이터 수집 시, 관리기의 로타리 위치 및 작업 환경에 따라 위험 상황이 다르게 발생한다는 점을 아래와 같이 가설로 설정하였다.
1)로타리가 엔진 앞에 위치한 경우: 돌 튐으로 인한 직접적인 충격 위험은 감소하지만, 단단한 지면에서의 역회전 힘에 의해 기계가 작업자 방향으로 밀려올 가능성 증가. 그리고 작업자의 부상 위험이 증가할 수 있음.
2)로타리가 엔진 뒤에 위치한 경우: 돌 걸림, 급정지, 도랑 빠짐 등으로 인해 발생하는 기계의 기울어짐 및 급가속 빈도 증가. 그리고 자이로센서 및 가속도계를 활용하여 각 상황에서 발생하는 충격력 비교.
Table 1.
Typical specifications of accelerometer and gyroscope sensors commonly used in SM-G920S.
충격력은 아래와 같은 공식을 사용하여 계산하였다(Eq. 1).
Fimpact: 충격력
m: 질량
axavg: 평균가속도
평균 가속도는 는 x축 방향으로 측정된 가속도의 평균값을 의미한다. 보다 구체적으로는, 관리기의 역주행 상황(즉, 돌 걸림 등의 충격 발생 시점)에서 기록된 x축 방향의 순간 최대 가속도 값을 35회의 반복 실험을 통해 수집하였으며, 이 값들의 산술 평균을 계산하여 정의하였다. 따라서 평균 가속도는 관리기 운행 중 충격 상황에서 발생한 x축 피크 가속도의 평균값으로, 이후 충격력 산출에 활용되었다.
이러한 실험 설계를 바탕으로, 위험 상황별 센서 데이터의 패턴을 분석하고, 기계 안정성 향상을 위한 설계적 개선 방안을 도출하는 것을 목표로 하였다(Table 2).
Table 2.
Criteria for determining hazardous situations during rotary tilling operations.
Results and Discussion
소형농업기계의 안정성 관련 설문조사 결과
설문조사에 참여한 농업인의 성별과 연령은 다음과 같다. 총 40명의 응답자 중 남성 응답자는 28명(70%), 여성 응답자는 12명(30%)으로, 농업기계 작업자 중 남성이 다수를 차지하였다. 연령별로는 60~70대가 28명(70%)으로 가장 많았으며, 이는 퇴직 후 귀농한 농업인 및 여성 농업인이 증가를 반영하는 결과로 해석할 수 있다. 농업기계 사용 경험에 대한 분석 결과, 응답자의 40%(16명)가 3년 이하, 15%(6명)가 3~7년, 45%(18명)가 8년 이상 사용한 것으로 나타났다. 이는 응답자가 소형 농업기계 사용에 대한 경험을 보유하고 있음을 시사하며, 반면에 약 40%의 응답자가 3년 이하의 짧은 경험을 가진 초보 사용자임을 보여준다.
설문 응답자 중 62.5%(25명)가 농업기계 사용 중 안전사고를 경험한 것으로 조사되었다. 사고는 주로 경운기40%(16건)와 관리기 27.5%(11건)에서 발생하였으며, 예취기 30%(12건)와 기타 농업기계 37.5%(15건)에서도 빈번하게 보고되었다. 사고 유형으로는 타박상(19건)이 가장 많았고, 끼임사고(7건), 골절(4건) 등이 주요 사고로 확인되었다(Table 3). 특히, 보행관리기 사용 중 돌 튐, 기계 전복, 도랑에 빠짐과 같은 주요 위험 요인이 지적되었으며, 이는 관리기 로타리 작업의 안전성 부족이 작업자의 신체와 심리적 부담을 가중시키는 요인임을 시사한다.
Table 3.
Survey on accident types and frequency related to safety incidents in small agricultural machinery.
| Accident machine | Frequency | Major accident type | Frequency (Type) |
| Rotary tiller | 11 | Contusion | 19 |
| Cultivator | 16 | Entrapment accident | 24 |
| Mower | 12 | Fracture | 4 |
|
Others (e.g., Thresher) | 15 |
Others (e.g., Burn) | 7 |
특히, 관리기 로타리 작업을 할 때 돌 걸림으로 기계제어가 어렵게 만들어 사고 발생 빈도를 증가시키는 것으로 나타났다. 또한, 경사지 및 깊이 파인 땅에서의 로타리 작업이 관리기의 기울어짐 및 전복 위험을 높이는 주요 원인으로 분석되었다. 이러한 작업 환경은 작업자의 안전성을 위협할 뿐만 아니라, 심리적 부담을 증가시켜 농업 기계 조작의 효율성 저하를 초래할 가능성이 있다. 농업인들은 이러한 안전 문제를 해결하기 위해 다양한 개선 요구를 제시하였다. 첫째, 작업 중 돌 튐 사고를 방지하기 위해 로타리 위치를 조정하거나 안전 가림판과 같은 보호 장치를 강화해야 한다는 의견이 제시되었다. 특히, 로타리 작업 시 돌이 기계에 걸려 튀어 오르는 현상이 빈번하게 발생하며, 이는 작업자의 부상을 유발할 가능성이 크기 때문에 안전 가림판의 추가 설치 및 강화가 필수적이라는 지적이 있었다. 둘째, 경사지나 깊은 작업환경에서 관리기의 안정성을 높이기 위해 위험 감지 및 대응 기술의 필요하다는 의견이 다수 제기되었다. 특히, 작업 중 돌 걸림과 같은 예기치 못한 상황에서 관리기의 갑작스러운 움직임을 최소화할 수 있는 방안이 요구되었다. 셋째, 고령 농업인과 여성농업인은 관리기의 무게와 조작 난이도에 대한 부담을 지적하였다. 이들은 경량화된 설계와 조작의 편리성을 높이는 개선이 필요하다고 응답하였다. 그러나 관리기의 무게가 가벼울수록 기계의 안전성이 저하될 가능성이 높아 조작 편의성과 안정성 간의 균형을 맞추는 설계가 요구된다. 넷째, 작업 중 발생하는 불규칙한 움직임과 충격력의 크기가 기체의 불안정성에 크게 영향을 미친다는 의견이 있었으며, 이러한 데이터를 활용하여 로타리 위치와 작업환경에 따라 최적의 작업조건을 제안해야 한다는 필요성이 제기되었다. 설문 결과는 관리기 로타리 작업의 안정성을 높이기 위해 올바른 작업 방법에 대한 정보가 중요함을 시사한다.
로타리 위치 및 작업환경별 작업자 위험성 평가
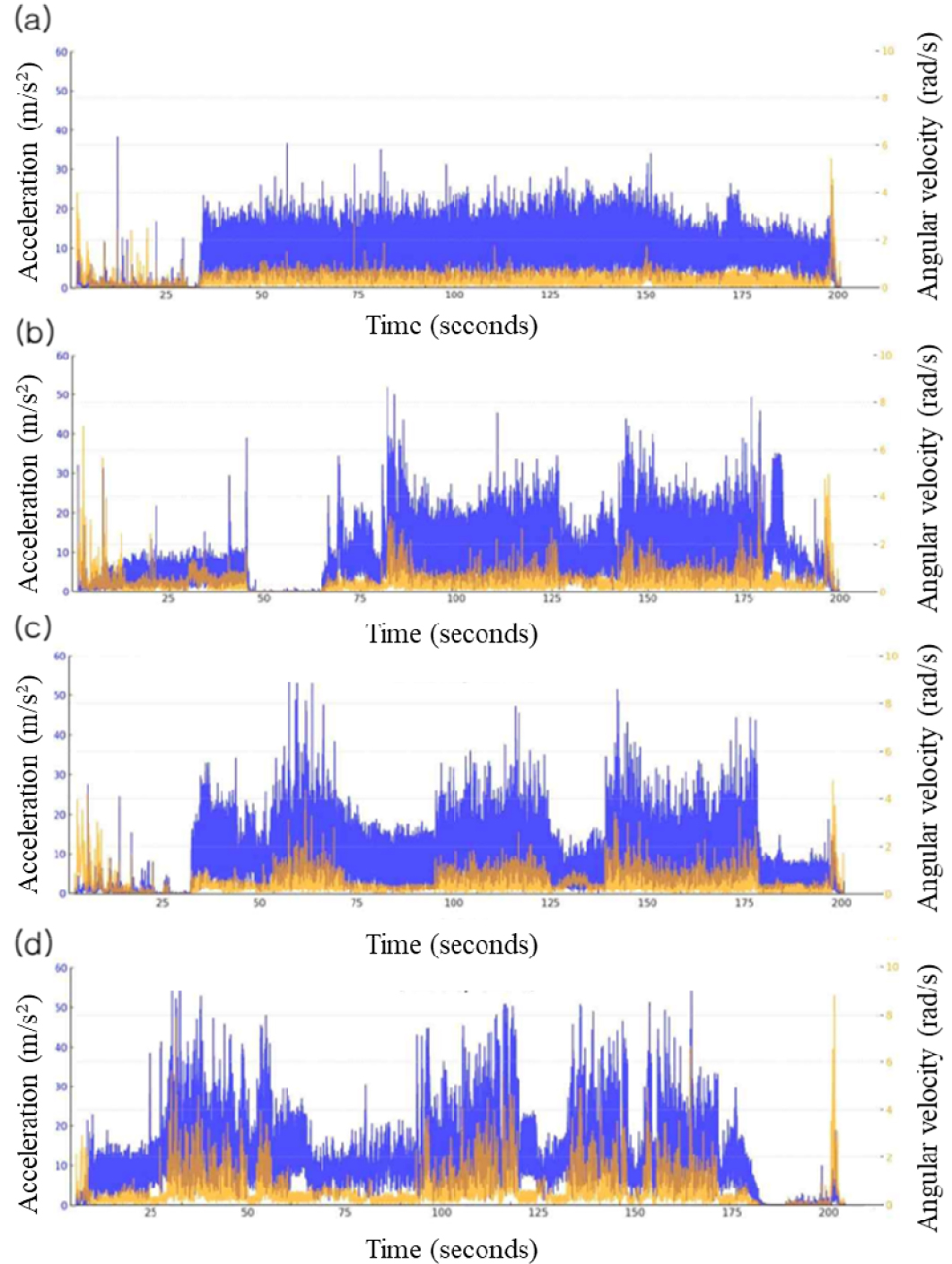
본 연구에서는 보행 관리기의 작업환경과 로타리 위치에 따른 작업 안정성을 정량적으로 평가하기 위해 가속도 및 자이로센서 데이터를 종합적으로 분석하여 위험상황의 패턴을 도출하였다. 실험은 고운밭과 자갈밭이라는 두 가지 필지 조건에서, 얕게 작업과 깊게 작업이라는 작업 깊이를 기준으로 총 네 가지 조건으로 나뉘어 진행되었다(Fig. 2). 분석 결과 자갈밭에서 깊은 작업을 수행하는 경우 급격한 가속도 및 각속도 변동이 가장 많이 발생하였으며, 특히 로타리가 엔진 앞에 위치할 때 이러한 변화가 더욱 두드러지게 나타났다. 자갈밭에서 깊은 작업은 가속도가 약 50 m/s²까지 증가, 그리고 각속도 값은 약 4 rad/s에 도달하였다. 특히 피치 축(y축)의 각속도 값이 반복적으로 급증하는 양상이 나타났으며, 이는 로터리 날이 돌에 걸리는 상황에서 관리기 전방이 들리거나 기울어지는 동작과 밀접하게 관련된 동역학적 반응으로 해석된다. 이러한 측정 결과는 기체의 앞부분이 순간적으로 상승하거나 작업자 방향으로 밀려오는 등, 실제 기울어짐 현상이 발생했음을 간접적으로 입증한다. 따라서 이러한 무리한 조건에서 로타리 작업을 하는 것은 기체의 작업 안정성을 크게 저하시키는 것을 보여준다.

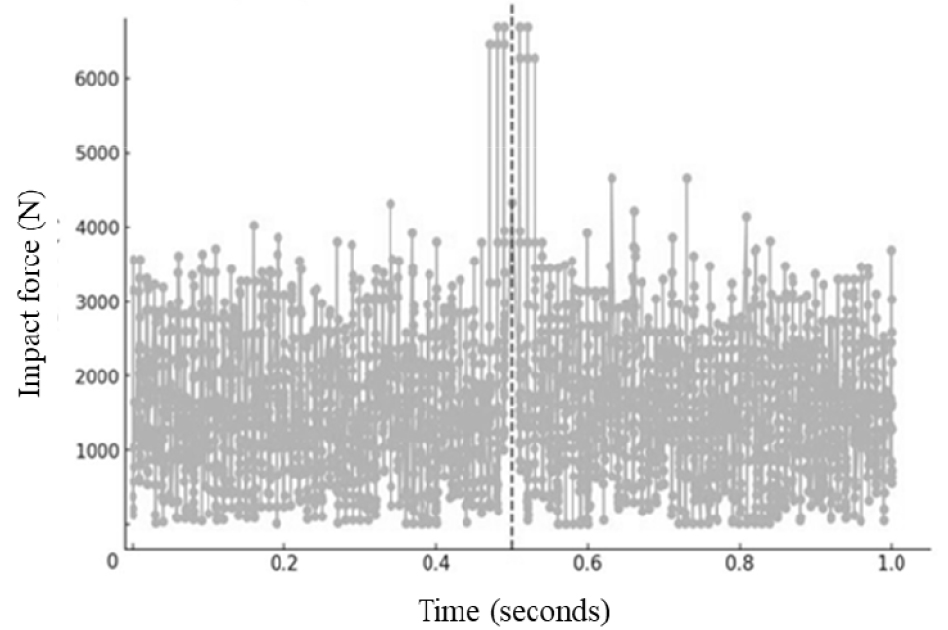
로타리가 엔진 앞에 위치한 경우, 작업 중 돌 걸림이 발생했을 때 로타리의 회전방향이 시계방향으로, 바퀴와 반대방향으로 작용하여, 관리기가 작업자 방향으로 밀려오는 현상이 관찰되었다. 총 7번의 관리기 주행 중, 35회에 거쳐 역주행 현상이 나타났으며, 이를 통해 가속도 센서를 활용하여 역주행 시 X축의 평균 가속도를 측정하였고, 다음 충격력 계산식으로 기체의 불안정성을 정량적으로 평가하였다. 공식을 바탕으로 분석한 결과, 평균 피크 시점(0.5초)의 충격력은 4,182 N으로 나타났으며, 그래프에서 유난히 높은 충격력이 발생한 약 0.48초 시점에서는 6,466 N의 최대 충격력이 기록되었다(Fig. 4). 이러한 최대 충격력은 로타리 작업 중 큰 돌에 로터리 날이 갑작스럽게 걸려 회전이 정지되면서 발생한 것으로 판단된다. 이때 회전 중이던 로타리의 관성 모멘텀이 돌에 의해 순간적으로 차단되며, 반작용으로 관리기 본체가 작업자 방향으로 급격히 밀려나는 현상이 발생하였다. 이러한 동작은 관리기 전방부가 들리는 동시에 후방으로 튕겨지는 움직임을 유발하며, 이 과정에서 높은 순간 충격력이 측정된 것이다. 특히 로타리가 바퀴의 주행방향과 반대 방향으로 회전하기 때문에 반작용력의 방향이 더욱 증폭되어 충격량이 크게 증가하는 것으로 해석된다.
역주행 상황에서 기록된 평균 충격력인 4,182 N과 최대 충격력인 6,466 N은 작업자에게 중등도에서 심각한 상해를 유발할 수 있는 수준으로 평가된다. 일반적으로 약 4,000 N 이상의 충격력은 손목, 발목, 갈비뼈와 같은 부위에서 골절을 유발할 수 있으며, 6,000 N 이상은 대퇴골 골절이나 장기 손상과 같은 치명적인 상해를 야기할 수 있다(Jo, 2015; Park and Kim, 2002). 특히 고령 작업자의 경우 골밀도 감소 및 근육 완충 능력 저하로 인해 동일한 충격에도 더 큰 상해를 입을 가능성이 높으며(Kim et al., 2002), 작업 환경의 예측 불가능성과 판단 반응 시간의 한계는 사고 위험을 더욱 가중시킨다.
본 연구에서는 로타리 위치에 따라 이러한 충격 상황의 발생 양상이 현저히 달라지는 것을 관찰하였다. 로타리를 엔진 앞쪽에 배치한 경우, 로타리의 회전방향이 전진 주행 방향과 반대이므로 돌 걸림 발생 시 반작용력이 작업자 방향으로 작용하며, 기체가 뒤로 밀려나는 역주행 현상과 함께 높은 충격력이 발생하였다. 반면 로타리를 엔진 뒤쪽에 배치한 경우, 로타리의 회전방향이 주행 방향과 일치하게 되어, 반작용력이 지면을 향해 작용하게 된다. 이로 인해 기체가 위로 들리거나 뒤로 밀리는 현상이 현저히 줄어들고, 안정적인 접지 상태가 유지되어 급격한 기울어짐이나 충격력 발생이 감소하는 경향을 보였다. 실험 결과에서도 엔진 뒤에 로타리를 부착한 조건에서는 역주행 현상이 관찰되지 않았으며, 급격한 가속도 변화 및 충격력도 유의미하게 감소하였다. 이는 로타리를 엔진 뒤에 배치하는 것이 관리기의 동적 안정성을 확보하는 데 효과적인 방법임을 시사한다.
가속도센서 데이터 패턴 분석
가속도 센서 데이터 분석결과, 작업환경에 따른 가속도의 변동 폭이 크게 차이를 보였다. 안정적인 작업환경에서는 가속도 크기 값이 일정한 범위를 유지하였으며, 돌발적인 변화가 거의 나타나지 않았다. 예를 들어, 고운 밭에서 얕게 작업한 경우 가속도 데이터는 일정하고 규칙적인 패턴을 보여 작업 안정성이 높은 것으로 평가되었다. 반면, 자갈밭에서 깊게 작업한 경우, 돌 걸림과 같은 위험상황에서 가속도 크기가 급격히 증가하거나 감소하는 패턴이 반복적으로 나타났다. 자갈밭에서 깊게 작업할 경우 위험 상황이 12회 발생하였으며, 가속도의 최대값은 60.2 m/s², 피크 값은 10.2 m/s²로 나타났다. 특히, 최고 가속도값을 바탕으로 계산한 충격력은 9,760 N에 달하여 작업자의 생명에도 심각한 위협을 초래할 가능성이 있음을 보여준다. 특히, 위험상황에서의 최대 가속도는 약 50~55 g 범위로 측정되었으며, 이러한 데이터는 안전한 작업환경에서의 가속도와 명확히 구분되었다. 가속도센서 데이터의 피크 탐지 분석 결과, 자갈밭 조건에서 급격한 가속도 변화가 확인되었다(Fig. 3). 고운밭에서 얕은 작업은 가속도의 최대값과 최소값이 모두 0으로 측정되어 위험상황이 발생하지 않아 가장 안정적인 작업환경으로 평가되었다. 고운밭에서 깊은 작업은 위험상황은 1회 발생했으며, 가속도의 최대값과 최소값은 각각 51.89 m/s²로 동일하여 피크 값이 0으로 계산되었다. 자갈밭에서 얕은 작업은 위험상황은 5회 발생하였으며, 가속도의 최대값은 54.77 m/s², 최소값은 51.61 m/s²로, 진폭은 3.17 m/s²로 나타났다. 이는 돌 걸림으로 인한 가속도의 급격한 변화를 반영한다. 자갈밭에서 깊은 작업은 위험상황은 총 12회 발생하였으며, 가속도의 최대값은 60.26 m/s², 최소값은 50.02 m/s²로, 피크 값은 10.24 m/s²로 계산되었다. 이는 깊은 작업조건에서 발생하는 급격한 가속도 변화를 명확히 보여준다. 특히 최고 가속도값으로 계산한 9,760 N의 충격력은 이러한 기준을 크게 초과하여, 작업자의 생명에도 심각한 위협을 가할 수 있는 위험 수준임을 나타낸다. 이 분석 결과는 작업환경과 조건이 가속도 변화와 밀접한 상관관계를 가지며, 자갈밭에서 깊은 작업이 가장 위험한 환경임을 시사한다(Table 4). 특히, 피크 값이 높을수록 돌 걸림, 급제동 및 급가속과 같은 위험상황 발생 가능성이 높아지는 것을 확인할 수 있었다.
Table 4.
Survey on accident types and frequency related to safety incidents in small agricultural machinery.
자이로센서 데이터 패턴 분석
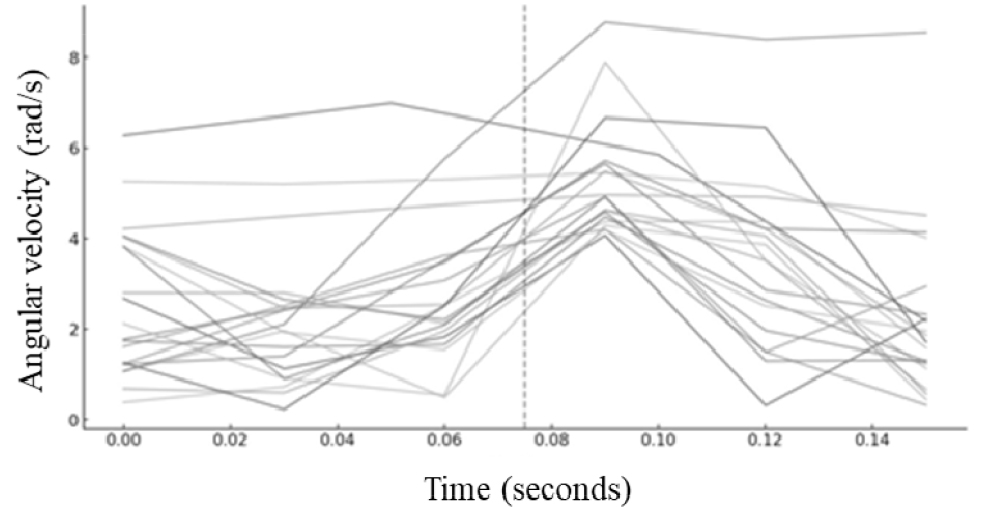
자이로센서는 관리기의 기울기와 회전 운동을 감지하여, 작업 중 발생하는 다양한 회전 및 기울기 변화를 분석하는 데 사용되었다. 실험 결과, 안정적인 작업환경에서는 자이로센서 데이터가 일정한 범위 내에서 유지되었으나, 위험한 상황에서는 급격한 변화 패턴이 관찰되었다. 분석 결과, 돌 걸림이나 기체의 급격한 기울어짐 현상에서 XYZ축의 자이로 크기가 급격히 증가하는 경향을 보였다. 돌 걸림 발생 시 XYZ축 각속도가 약 4~5 rad/s에 도달하였고, 깊게 작업할 경우 도랑에 빠지거나 한쪽으로 기울어지는 현상은 Y축 각속도 값이 급격히 상승하는 원인으로 작용하였다(Fig. 5).
자이로센서 데이터의 피크 탐지 분석 결과, 깊은 작업조건에서 급격한 가속도 변화가 확인되었다. 고운밭에서 얕은 작업의 자이로센서 최대값은 5.45 rad/s, 최소값은 위험 상황 기준 이상으로 4.55 rad/s로 확인되었으며, 피크 값은 0.90 rad/s로 나타났다. 위험 상황은 총 2회 발생하여, 고운밭에서 얕은 작업은 비교적 안정적인 작업환경임을 보여준다. 반면, 고운밭에서 깊은 작업은 자이로센서 최대값이 6.99 rad/s, 최소값은 위험 상황 기준 이상으로 4.63 rad/s로 나타났으며, 피크 값은 2.36 rad/s로 계산되었다. 위험 상황은 총 4회 발생하였으며, 이는 깊은 작업이 얕은 작업에 비해 위험 상황을 증가시킬 가능성이 높음을 보여준다. 다음은 자갈밭 실험의 결과이며, 자갈밭에서 얕은 작업의 경우, 자이로센서 최대값은 4.77 rad/s, 최소값은 위험 상황 기준 이상으로 4.20 rad/s로 계산되었으며, 피크 값은 0.57 rad/s로 나타났다. 위험 상황은 총 3회 발생하였고, 이는 자갈밭에서 얕은 작업이 상대적으로 안정적일 가능성을 시사한다. 자갈밭에서 깊은 작업은 자이로센서 최대값이 8.78 rad/s, 최소값은 위험 상황 기준 이상으로 4.07 rad/s로 나타났으며, 피크 값은 4.71 rad/s로 계산되었다. 위험 상황은 총 11회 발생하였으며, 이는 자갈밭에서 깊은 작업이 모든 환경 중 가장 위험한 조건임을 명확히 보여준다.
자이로센서 데이터를 바탕으로 위험 상황 기준 이상을 고려한 분석 결과, 자갈밭에서의 작업은 고운밭에 비해 위험도가 높았으며, 특히 깊은 작업이 얕은 작업보다 위험 상황 발생 빈도가 더 많고 피크 값이 크게 나타났다. 이는 가속도 데이터를 중심으로 한 분석과 차이를 보인다. 가속도 데이터는 주로 자갈밭에서 작업조건의 차이를 강조한 반면, 자이로센서 데이터는 작업 깊이에 따른 위험성을 명확히 보여준다. 이러한 분석 결과는 작업환경별 안전 조치 필요성을 구체적으로 설명하며, 특히 자갈밭에서 깊은 작업 시 더 높은 수준의 주의와 안전 대책이 필요함을 시사한다.
본 연구에서는 자이로센서를 활용하여 관리기 작업 중 도랑 빠짐과 같은 위험상황에서 발생하는 기울기 변화를 대칭성 평가 지표로 분석하였다. 위험상황이 있을 때마다 작업환경별로 대칭성을 평가하였다. 대칭성 평가 결과, 고운밭에서 얕게 작업한 경우 도랑빠짐이 없어 기울기 변화가 거의 없었으며, 작업환경이 안정적으로 평가되었다. 고운밭에서 깊게 작업한 경우에는 한쪽으로 기울어진 값의 총합이 약 20.9로 나타났다. 이를 통해 깊은 작업조건에서 기체가 한쪽으로 치우칠 가능성이 있음을 확인할 수 있었다. 자갈밭에서 얕게 작업한 경우, 빈 토양이 많아 한쪽으로 기울어진 값의 총합은 약 27.3로 나타났다. 이는 얕은 작업조건에서도 기체가 한쪽으로 치우치는 불균형 상태가 발생할 수 있음을 보여준다. 자갈밭에서 깊게 작업한 경우에는 왼쪽으로 기울어진 값의 총합이 약 206.9로 측정되었으며, 오른쪽 기울어짐은 없었다. 이는 자갈밭에서 깊은 작업조건이 도랑 빠짐으로 인한 기체 기울어짐 발생 위험이 가장 높은 환경임을 나타낸다. 대칭성 지수(Symmetry Index)는 왼쪽 기울기와 오른쪽 기울기의 불균형 정도를 나타내는 지표로 사용되었으며, 고운밭 얕은 작업조건을 제외한 모든 작업조건에서 대칭성 지수가 1.0으로 도출되었다. 위 결과는 한 번에 깊게 작업함으로 인해 관리기가 작업 중 특정 방향으로 치우쳐 작업 안정성이 저하될 가능성을 시사한다. 특히, 자갈밭과 깊은 작업조건에서는 이러한 기울기 변화가 두드러지게 나타났으며, 이는 토양에서 함몰된 부분 또한 잦다는 것이다. 본 연구는 대칭성 평가를 통해 작업환경별 기체 안정성을 정량적으로 분석하였으며, 관리기의 기울어짐 발생 가능성을 줄이기 위한 설계 개선 및 작업환경 관리의 중요성을 강조하였다. 이를 통해 관리기 사용 중 발생할 수 있는 도랑 빠짐과 같은 위험상황을 예방하고, 작업자의 안전을 확보할 수 있는 기초 자료를 제공하였다.
Conclusion
본 연구는 보행 관리기의 로타리 위치와 작업 환경이 안전성에 미치는 영향을 정량적으로 분석하기 위해, 가속도 및 자이로센서를 활용한 데이터 기반 접근 방식을 채택하였다. 연구는 고운밭과 자갈밭이라는 두 가지 작업환경, 얕은 작업과 깊은 작업이라는 작업 깊이 조건, 그리고 로타리의 위치(엔진 앞 또는 작업자 쪽)에 따라 발생하는 위험상황을 평가하는 방식으로 수행되었다. 데이터 분석 결과, 로타리가 엔진 앞에 위치한 경우, 돌 걸림 상황에서 관리기가 작업자 방향으로 역주행하는 현상이 발생하였으며, 이는 인체에 상해를 입힐 만한 높은 충격을 가할 수 있는 위험 요소로 작용하였다. 이 때, 평균 피크 충격력은 4,182 N, 최대 충격력은 6,466 N으로 측정되어, 골절 및 심각한 부상을 초래할 수준임이 확인되었다. 반면, 로타리를 작업자 쪽으로 배치한 경우, 돌 튐 현상이 발생하였으나 역주행과 같은 치명적인 위험이 감소하며 상대적으로 높은 작업 안정성이 유지되는 경향을 보였다. 또한, 자갈밭에서 깊게 작업한 조건은 전반적으로 가장 위험한 환경으로 확인되었으며, 가속도와 자이로센서 값에서 급격한 변화 패턴이 관찰되었다. 로타리 작업 위치와 작업 환경이 관리기 안정성에 미치는 영향을 정량적으로 분석한 결과, 자갈밭 깊은 작업은 고운밭 얕은 작업에 비해 위험상황 발생 빈도가 12배 높았다. 특히 깊은 작업에서 발생한 최대 충격력은 약 9,760 N으로, 이는 작업자의 생명에도 심각한 위협을 초래할 수 있는 수준임이 정략적으로 확인되었다.
이 연구는 보행 관리기의 로타리 위치와 작업환경이 작업 안정성에 미치는 영향을 실험적으로 분석하고, 이를 정량적으로 평가한 연구 중 하나로, 아래와 같은 중요한 시사점을 제공한다.
(1)로타리를 엔진 앞에 배치할 경우, 돌 걸림으로 인해 역주행 및 높은 충격력이 발생하여 작업자의 부상 위험이 증가할 수 있음.
(2)작업자 쪽으로 배치할 경우, 역주행 위험이 감소하나 돌 튐 현상이 존재하므로, 이에 대한 보호 장치 개발이 필요함.
(3)자갈밭에서 깊은 작업을 수행하는 것이 가장 위험한 작업 조건으로 확인됨.
(4)이러한 환경에서의 관리기 사용은 신체적 부담과 사고 위험을 증가시키므로, 안전장치 강화 및 운용 매뉴얼 개선이 필요함.
(5)작업자의 안전을 보장하기 위해 농업기계 사용자의 교육 및 안전사고 예방 프로그램이 필수적임을 강조.
본 연구를 토대로 향후 다양한 작업 속도 및 기후 조건에서의 안정성 평가 혹은 로타리 보호 장치 개발 및 역주행 방지 시스템 설계 등의 연구가 필요할 것으로 보인다.
