

Introduction
Materials and Methods
곡선 경로 생성 알고리즘
곡률 적용 작업기 기준 경로 추종 알고리즘
3D 트랙터 시뮬레이터 실험 구성
자율주행 트랙터 현장 실험 구성
Results and Discussion
곡선 경로 추종 알고리즘 시뮬레이션 테스트
곡선 경로 생성 및 경로 추종 기술 현장 검증 및 성능 평가
Conclusion
Introduction
자율주행 기술은 자동차 산업뿐만 아니라 농기계 산업에서도 농업 인구 감소 및 고령화에 따른 부족한 농업 인력을 대체할 수 있는 기술로 관심 증가하고 있으며, 정밀한 자율주행 농기계에 대한 수요가 증가하고 있다(Adhikari et al., 2020). 국내에서는 LS엠트론, 대동, TYM 등이 자율주행 기술이 탑재된 트랙터를 출시하였으며, 해외의 경우 John Deere, Kubota, AGCO 등에서 자율작업 트랙터를 개발하여 판매하고 있다.
자율주행 농기계는 주로 GNSS(Global Navigation Satellite System) 기반 측위를 통하여 사전에 정의된 작업 경로를 따라 자율적으로 움직이며 농작업을 수행한다. 기울기가 고른 직교형 및 다변형 농지에서 자율주행 트랙터의 작업영역 겹침과 미작업영역을 감소시키기 위한 GNSS 기반의 자율주행 경로 생성에 대한 연구(Zhang and Qiu., 2004; Lenain et al., 2007; Han et al., 2015)와 생성된 경로를 추종하고 작업기 제어까지 가능한 자율주행 트랙터 연구가 수행되어왔다(Han et al., 2019; Jeon et al., 2024). 그러나 국내 밭농지의 약 62%는 구릉지나 산간 지역을 중심으로 기울기가 7 deg 이상의 불균일한 비정형 환경이 많기 때문에 기존 연구에서의 한계점이 존재한다(Kang et al., 2025).
평지에 위치한 농지는 논의 경우 대부분 직교형으로 바둑판 모양을 이루며 형성되어 있지만, 산지에 위치한 기울기가 불균일한 농지는 등고선을 따라 농지 경계를 형성하고 작업열을 생성하기 때문에 직선으로 정의하기 어려운 형태의 다양한 곡선 궤적을 나타낸다(Hameed et al., 2016). 비정형 농지에서 자율주행 농기계를 위한 직선 경로로 이루어진 경로 생성 알고리즘은 개발되었지만, 자율주행 트랙터의 정밀한 작업을 위해서는 작업 영역의 겹침량과 미작업영역을 감소시킬 수 있는 곡선 경로 생성 기술이 필요하다(Höffmann et al., 2023). 기존의 경로 추종 기술은 농기계의 후륜 중앙을 기준으로 주행하였지만, 곡선의 경우 정밀한 경로 추종과 작업 효율을 증가시킬 수 있는 경로 추종 기술이 요구된다(Hameed et al., 2013; Rahman et al., 2019; Urvina et al., 2024). 따라서, 국내의 비정형 농업환경에 적용 가능한 곡선 작업 경로 생성 기술과 함께 곡선 경로 상의 작업기 위치 및 경로의 곡률 특성을 고려한 작업기 중심 경로 추종 기술이 필요하다. 본 연구에서는 직선과 같이 일정한 형태로 정의하기 힘든 비정형 농지에 적용 가능한 자율주행 기술을 개발하고자 하였다. 이를 위해 작업자가 곡선 주행하여 생성한 기준 경로를 기반으로 곡선 작업경로와 두빈스(Dubins, 1957) 곡선 기반 오메가(Ω)형 선회경로를 포함하는 왕복 곡선 작업경로 생성 기술을 개발하고, 곡선 경로 추종 시 농작업 효율이 감소하는 한계를 극복하기 위하여 기존의 차량 중심 제어 방식이 아닌 작업 경로의 곡률 특성을 반영한 작업기 중심 제어 기반의 경로 추종 알고리즘을 개발하는 것을 목표로 하였다. 개발한 알고리즘은 가상의 3D 트랙터 주행 시뮬레이터와 실제 현장에서 자율주행이 가능한 트랙터를 이용하여 성능을 평가하였다.
Materials and Methods
곡선 경로 생성 알고리즘
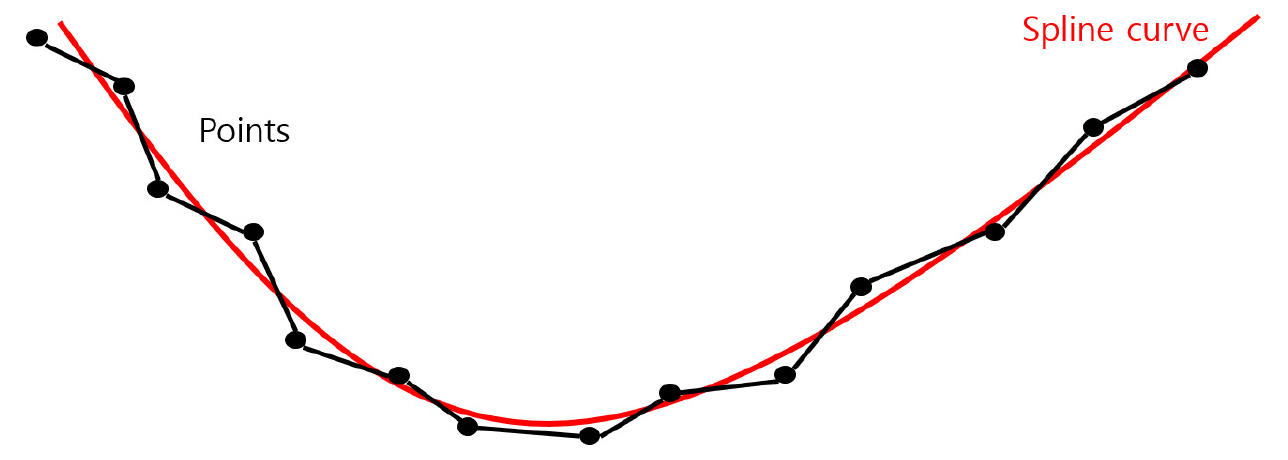
기준 경로(Guidance line)는 작업자의 수동 주행으로 생성되기 때문에 GNSS의 오차나 노이즈 등으로 생성하고자 하는 경로와 다르게 형성될 수 있다. 곡선 경로를 생성하기에 적합한 하나의 매끄러운 기준 곡선을 만들기 위하여 Fig. 1과 같이 주행을 통해 수집된 GNSS 위치 정보 x, y 데이터에 스플라인(Spline) 방법을 적용하였다(Maekawa et al., 2010). 경로의 시작점과 종료점은 작업자가 기준 곡선경로를 생성하기 위해서 경로를 저장하기 시작하고 종료한 시점에서의 트랙터 위치로 정의하였다.
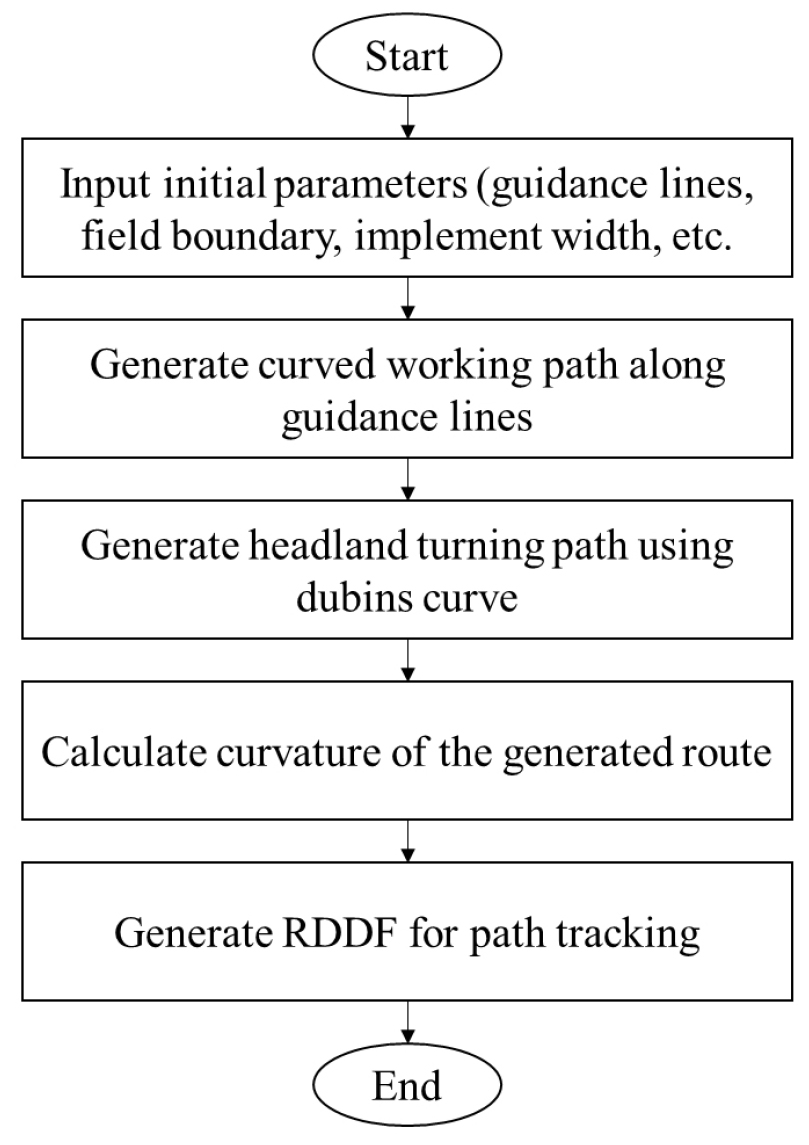
주행 방향은 등고선 방향으로 작업열을 생성하는 밭을 고려하여 농지의 가장 긴 경계선 방향으로 설정하였으며, 곡선 경로 생성 알고리즘의 개요도는 Fig. 2와 같다. 알고리즘의 초기 단계에서는 작업자가 첫 작업 열을 수동으로 주행하며 획득한 경로를 포함하여 차량의 최소 선회 반경, 주행 속도, 작업기의 폭, 경계 오차 한계인 LBO (Limit of Boundary Offset) 값, 그리고 주행 및 경로 생성 방향을 입력해주었다. 주행 속도는 농촌진흥청 농업기술길잡이 농사로에 제시되어 있는 경운 및 휴립 작업 권장 속도 범위인 2.5 km/h를 고려하였고 LBO 값은 차량의 경로점 도달 여부를 판단하기 위한 경로점 기준 반경으로 가정하여 사용하였다. 평탄 스플라인(Smoothing-spline) 기법을 통해 생성된 경로를 기준으로 생성하고자 하는 작업열 간격(혹은 작업기의 폭) 및 농지의 크기를 고려하여 작업 대상 농지의 곡선 작업 경로를 생성하였다. 이때, 생성할 경로의 수(N)는 식 (1)과 같이 기준 경로의 폭과 작업하고자 하는 경로의 폭을 고려하여 결정하였다. 생성된 각 경로의 경로점은 기준 경로를 기준으로 생성하고자 하는 경로의 수를 고려하여 식 (2)를 통해 생성되었다.
Where, = First guidance path, = Second guidance path, = Width of the implement, = Number of additional paths to be created.
Where, = x-coordinate of the waypoint, = y-coordinate of the waypoint, = Number of additional paths.
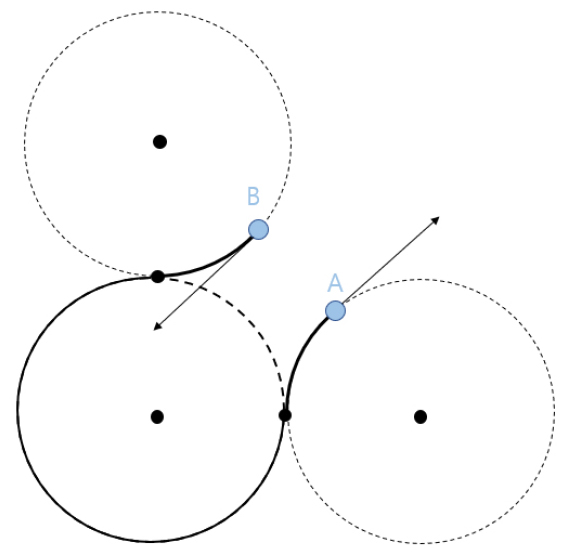
다음 작업 경로로 진입하기 위해서는 이전 작업경로와 다음 작업경로를 이어주는 선회경로가 필요하다. 본 연구에서는 선회 경로를 생성하기 위해서 두빈스 곡선 방법을 적용하여 선회 경로를 생성하였다. 두빈스 곡선은 출발점과 도착점의 위치와 방향이 주어질 때 최단경로가 직선(S) 세그먼트와 좌회전 혹은 우회전을 나타내는 최소 반경의 호(R 또는 L) 세그먼트 3개의 경로 조합으로 구성되며, 세그먼트 구성 및 회전 순서에 따라 총 6가지 형태(LSL, LSR, RSL, RSR, LRL, RLR)가 존재한다. 본 연구에서는 트랙터의 최소 회전 반경 5m, 선회 형성 구간의 초기 및 최종지점의 방향을 고려하여 형성하였으며, 선회 출발점과 도착점의 차이가 트랙터의 최소 회전 반경보다 좁기 때문에 Fig. 3과 같이 오메가() 형태로 설계하였다. 이에 대한 출력은 전체 경로에 대한 경로점들의 집합인 경로 정의 데이터 형식의 RDDF (Route Data Definition File)를 따라서 경로 추종에 필요한 경로 정보를 생성하였다.
곡률 적용 작업기 기준 경로 추종 알고리즘
조향각 계산은 이전 연구(Han et al., 2019)에서 개발한 경로 추종 알고리즘에 앞서 생성된 경로점들이 이루는 곡선의 곡률을 적용하였으며, 기존 방식과 달리 전방 주시 거리(Look-ahead distance)를 트랙터에 장착된 농작업기 중심을 기준으로 Fig. 4와 같이 적용하였다. 조향 제어를 위한 측면 편차와 방향각 오차는 작업기 기준 알고리즘에 사용된 계산 방식과 동일하게 전방 주시 거리를 기준으로 반영하였다. 이를 종합하여 작업 경로의 곡률이 적용된 작업기 기준 조향각 계산은 식 (3)을 이용하였다.
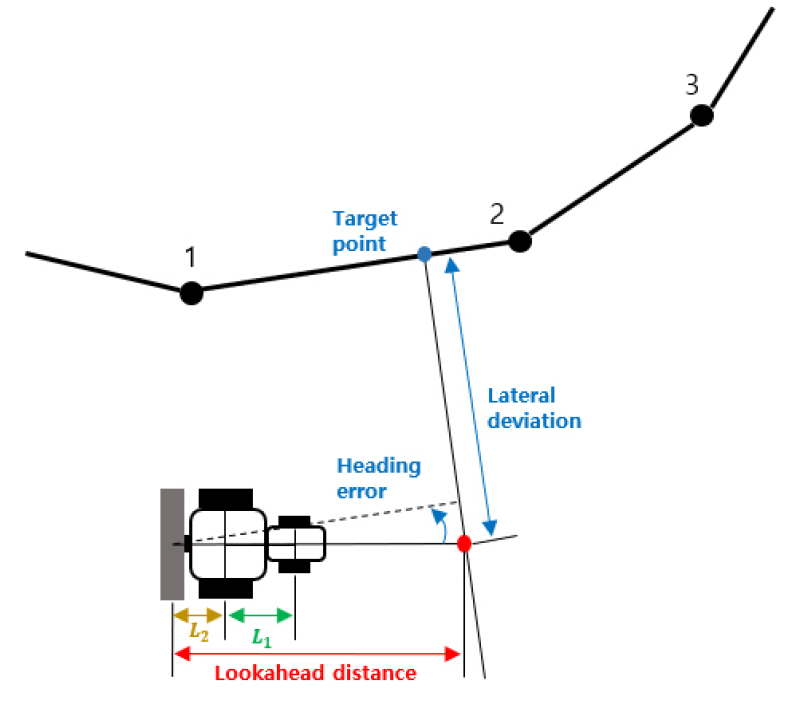
where, = Steering angle of tractor, = Lateral deviation, = heading error, = curvature, = Center of front axle to rear axle, = Center of rear axle to implement, = Proportional gain, = Differential gain.
3D 트랙터 시뮬레이터 실험 구성
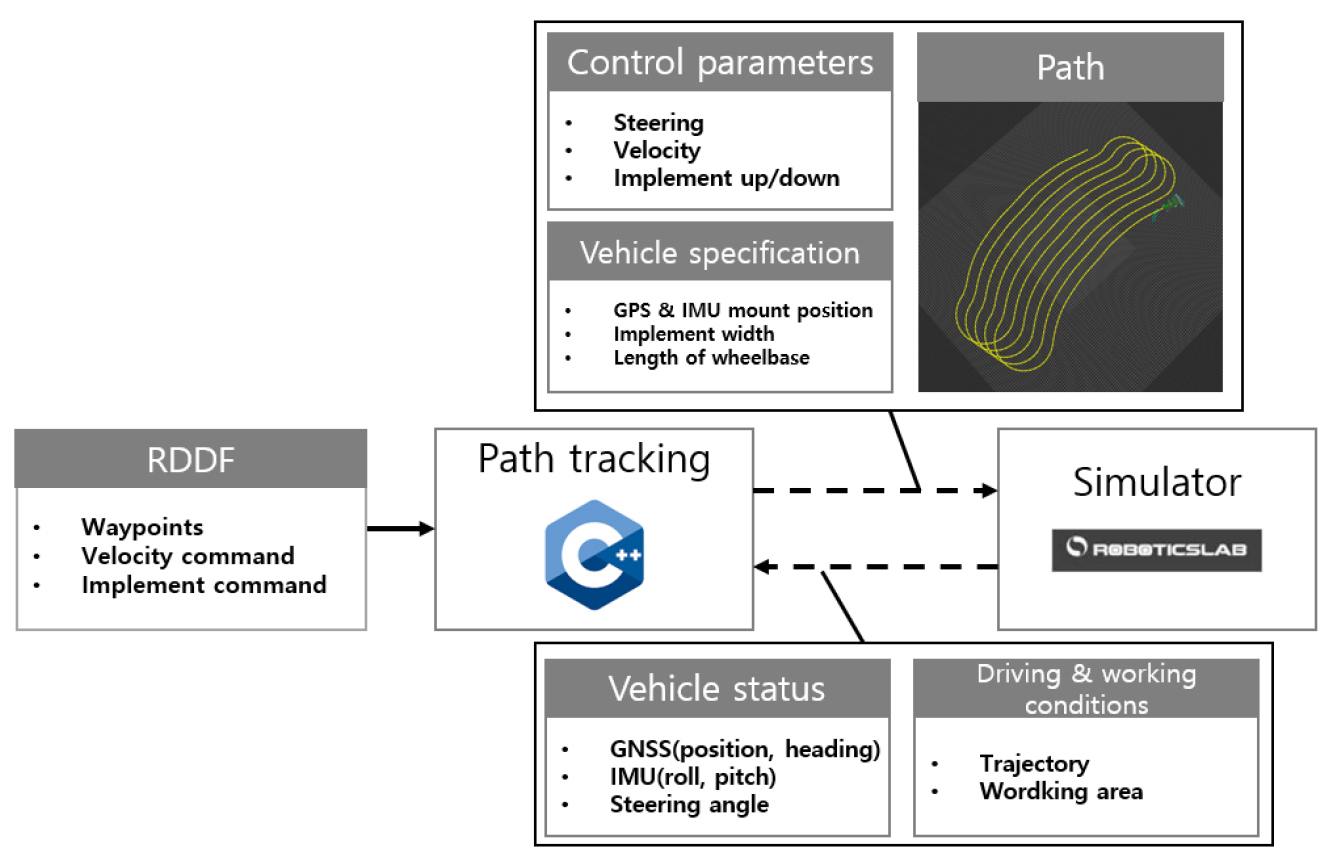
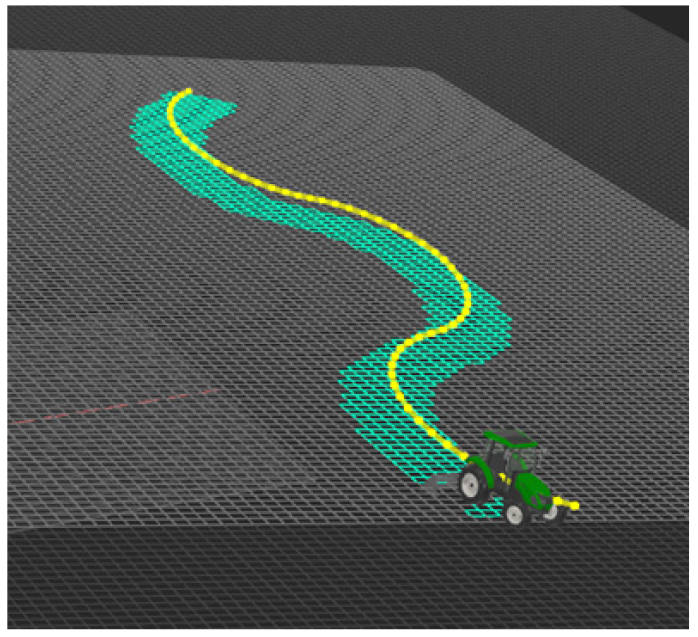
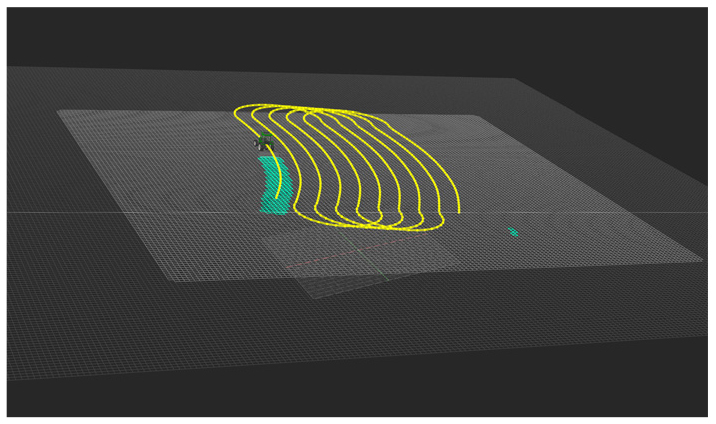
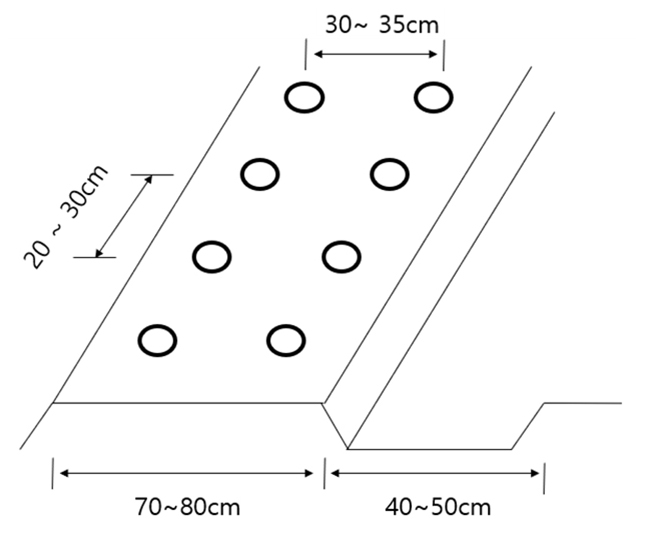
경로 생성 알고리즘의 효용성, 작업기 기준 조향 계산과 곡률 적용 경로 추종 알고리즘의 타당성을 분석하기 위하여 Fig. 5와 같이 기존 연구(Han et al., 2019)에서 활용한 RoboticsLab 2009 (ver. 1.10, Simlab Co., Seoul, Korea) 시뮬레이터를 사용하였다. 시뮬레이터는 전방() 및 후방 타이어()의 코너링 강성 계수에 의해 영향을 받는 다양한 측 방향 힘을 고려할 수 있는 동적 차량 모델인 확장기구학 자전거모델(Extended Kinematics Bicycle Model)을 기반으로 차량의 미끄러짐(Slip), 경사지, 불규칙한 노면에서의 움직임을 표현할 수 있다. 또한 가상의 작업기가 장착된 트랙터 모델은 사전에 정의된 경로점(waypoint)과 현재 차량 위치를 기반으로 경로 추종 알고리즘이 계산한 조향각, 속도, 그리고 작업기 상승, 하강 정보를 통해 가상 농작업 환경에서 움직일 수 있다. 이때 작업기의 위치에 따라 작업 영역과 비작업 영역을 시각적으로 식별할 수 있도록 가상의 트랙터에 부착된 작업기의 폭을 표시하는 그래픽 기능이 Fig. 6과 같이 사용되었다. 또한, 시뮬레이터 환경에서 국내 밭환경의 평균 경사도를 고려하여 Fig. 7과 같이 경사 13 deg의 환경을 구성하고 시뮬레이션 테스트를 진행하였다. 작업은 경운을 하면서 두둑을 형성하는 휴립 작업을 고려하였으며, 두둑의 폭은 Fig. 8과 같은 평두둑 2개를 생성 조건을 기준으로 최대 조건인 2.1 m 설정하여 곡선 작업 경로를 생성하였다. 선회를 포함한 곡선 작업 경로에 적용하여 작업의 특성을 고려하여 2, 4 km/h의 속도로 주행하며, 곡률 적용 유무에 따른 작업의 정확도를 비교해보고자 하였다.
자율주행 트랙터 현장 실험 구성
본 연구의 현장 실험 위해 Fig. 9와 같이 85마력 트랙터 TX853 (TYM, Seoul, Korea)을 활용하였으며, 제원은 Table 1과 같다. 또한 자율주행 트랙터의 조향제어를 위해 조향각 센서(Steer sensor, ComeSys, Korea) 및 EPS (Electrical Power Steering) 시스템(Unmanned Solution Co., Seoul, Korea)을 장착하였고, 실시간으로 정밀한 위치 및 자세정보 제공을 위해 LTE 기반의 RTK (Real-Time Kinematic) 시스템(Synerex MRD-1000T., Korea)과 GNSS/INS (Global Navigation Satellite System/Inertial Navigation System) 시스템(Ellipse-D, SBG SYSTEMS, France)을 활용하였다(Table 2). 트랙터 상위 레벨 제어기는 Raspberry Pi 4 (Raspberry pi, UK)를 활용하였고, CAN (Control Area Network) 통신 기반으로 20 Hz의 통신속도로 GNSS/INS를 통해 얻은 트랙터의 위치 및 자세 정보를 통해 조향 제어를 실시하였다. 농작업을 위한 농작업기는 폭 2.4 m의 로터베이터(YJ 215GM, YoungJin Machinery Co., Korea)를 활용하였다.
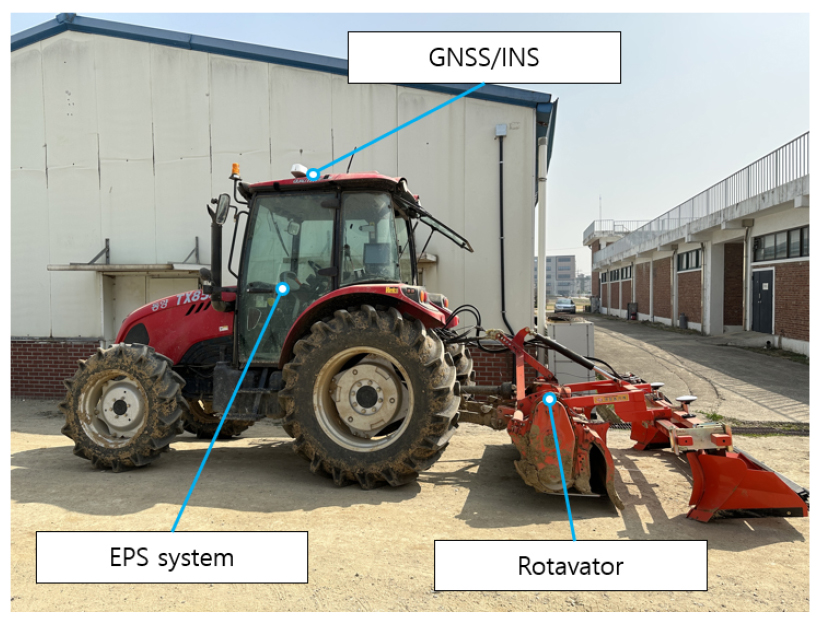
Table 1.
Specifications of the TX853 tractor used in field test.
Table 2.
Components of auto-guided tractor.
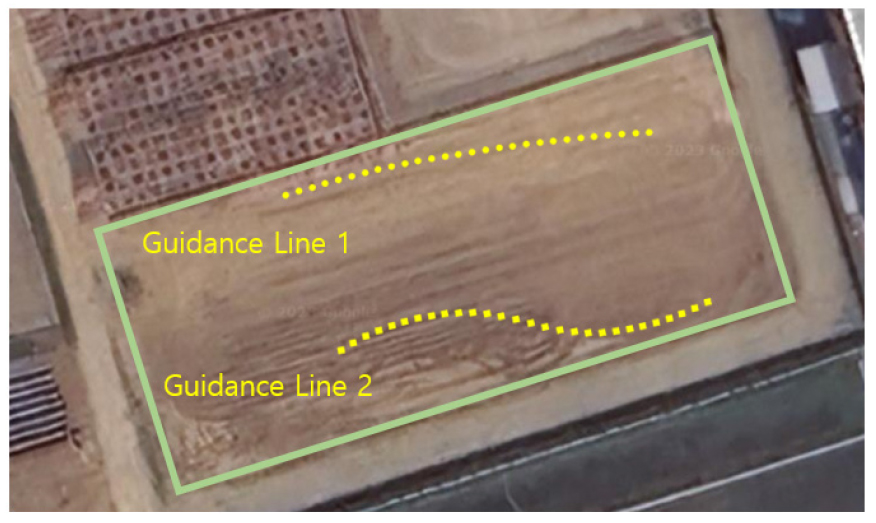
개발한 기술의 성능 평가와 현장 적용성을 검토하기 위해서 길이 70 m, 폭 30 m로 구성된 경기도 수원시 서울대학교 수원농장의 농지에서 실험을 실시하였으며, 자율주행 트랙터의 경로 추종을 위해 적용된 전방 주시 거리(= 1.2 m), Kp(= 0.5), Kd(= 0.1) 조건으로 진행되었다. 개발한 곡선 경로 생성을 위해서 Fig. 10의 농지 장변 상단과 하단을 중심으로 경로 기준선을 주행을 통해 생성하고, 작업폭을 고려하여 경로 기준선 사이에 추가적인 곡선 작업 경로를 생성하였다. 실험은 2.5 km/h의 속도로 주행하였으며, 작업 경로 상에서 곡률을 고려한 경로 추종 알고리즘과 곡률을 고려하지 않은 알고리즘의 기준 경로 대비 작업기 위치 오차를 비교하여 곡선 경로 생성 기술과 곡률을 고려한 작업기 기준 경로 추종 기술에 대한 검증을 실시하였다. 평가 방법은 기준 경로 대비 트랙터에 장착된 작업기 중심의 측면 및 방향각 편차 각각의 평균 제곱근 오차(RMSE, Root Mean Square Error)를 식 (4)를 통해 계산하였으며, 기준 경로 대비 트랙터 위치가 좌측에 위치하면 음(-), 우측에 위치하면 양(+)로 구분하여 측면 편차를 계산하였다. 또한 기준 경로의 방향과 주행 중인 트랙터의 방향각에 정확성을 비교하기 위하여 오차를 식 (5)를 활용하여 계산하였으며, 경로의 방향을 기준으로 트랙터의 좌측 회전이 음(-), 우측 회전이 양(+)로 측정하였다.
Where, = Location of implement, = Location of the reference path, = number of total samples.
Where, = heading of implement, = heading of the reference path, = number of total samples.
Results and Discussion
곡선 경로 추종 알고리즘 시뮬레이션 테스트
곡률 특성의 반영 유무에 따라 경로 추종 경향성과 타당성을 분석하기 위해 시뮬레이터를 이용하여 주행 성능을 분석하였다. Table 3과 Table 4와 같이 속도 2 km/h일 때 곡률 적용 여부에 따라 측면 편차는 4 cm, 속도 4 km/h일 때 측면 편차 5 cm의 차이를 나타내며, 곡선 경로 추종 시 속도에 따른 곡률 적용 여부에 대한 효용성을 확인하였다. 또한, 추종 경로 결과는 Figs. 11, 12, 13, 14와 같이 확인하였다. 이러한 결과를 통해 농림축산식품부의 자율주행 농기계 농작업 허용 오차 범위 7 cm 이하(MAFRA, 2023)에 만족하는 결과를 보였으며, 경사가 존재하는 밭에서 곡선 경로를 주행하며 두둑 형성 작업의 현장 적용성에 대한 가능성을 보였다.
Table 3.
Comparison of the RMSEs heading error and lateral deviation in the curved working path at 2 km/h without and with curvature application.
| RMSEs of | Without curvature | With curvature |
| Heading error (deg) | 3.92 | 3.08 |
| Lateral deviation (m) | 0.11 | 0.07 |
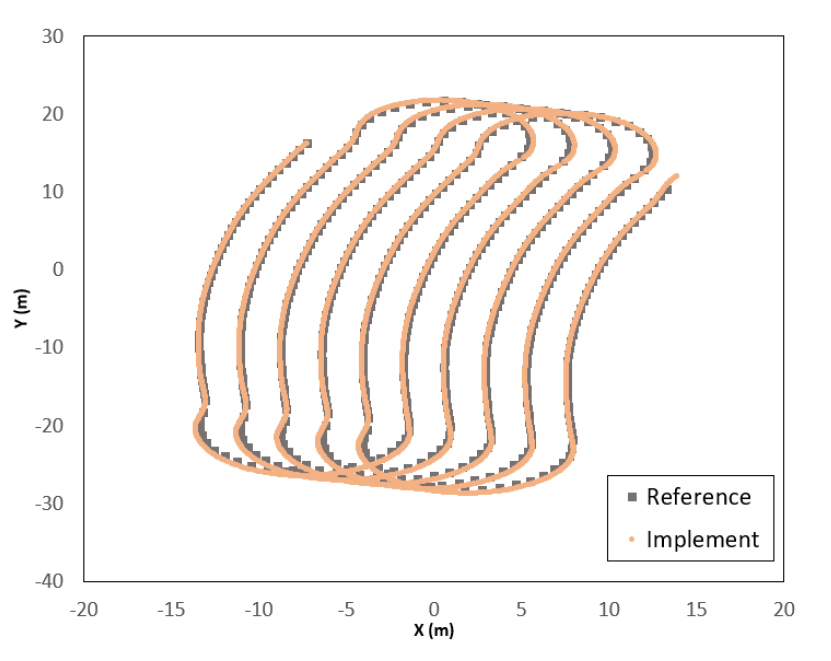
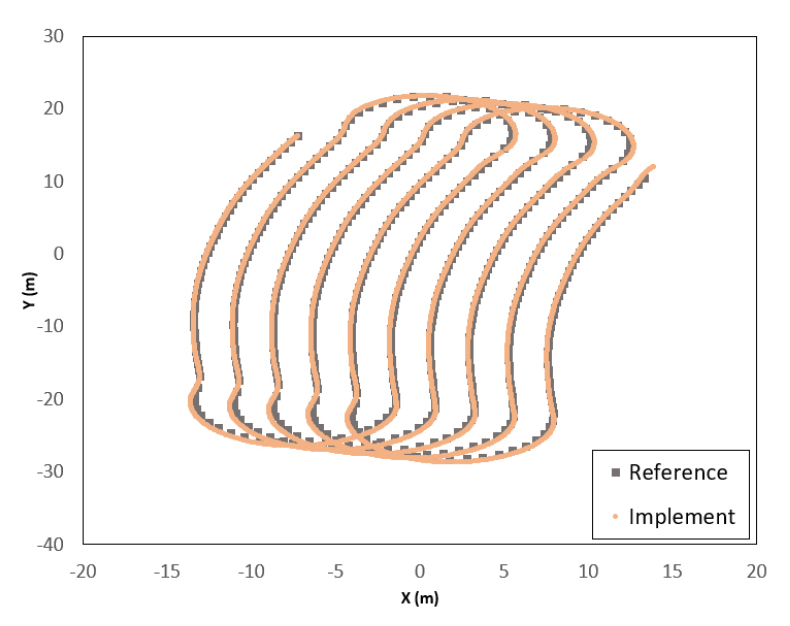
Table 4.
Comparison of the RMSEs heading error and lateral deviation in the curved working path at 4 km/h without and with curvature application.
| RMSEs of | Without curvature | With curvature |
| Heading error (deg) | 3.41 | 2.73 |
| Lateral deviation (m) | 0.12 | 0.07 |
곡선 경로 생성 및 경로 추종 기술 현장 검증 및 성능 평가
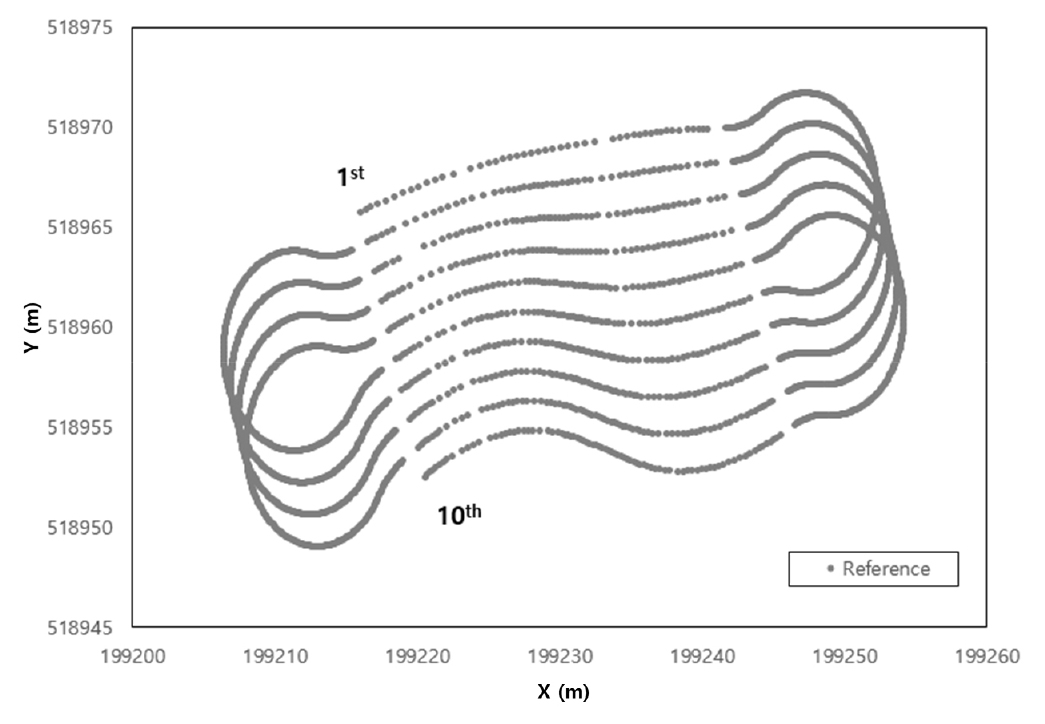
개발된 경로 생성 및 경로 추종 기술을 검증하기 위해서 개발된 왕복 곡선 작업 경로를 생성하고 이를 기반으로 2.5 km/h의 속도로 주행하며 현장 적용성을 확인하고 평가하고자 하였다. 왕복 곡선 작업 경로 생성을 위해서 기준이 되는 경로를 수동 주행을 통해 생성하고, 작업폭을 고려하여 추가적인 곡선 경로와 선회 경로를 Fig. 15와 같이 다양한 형태의 곡선을 포함하는 10열의 경로를 생성하였다.
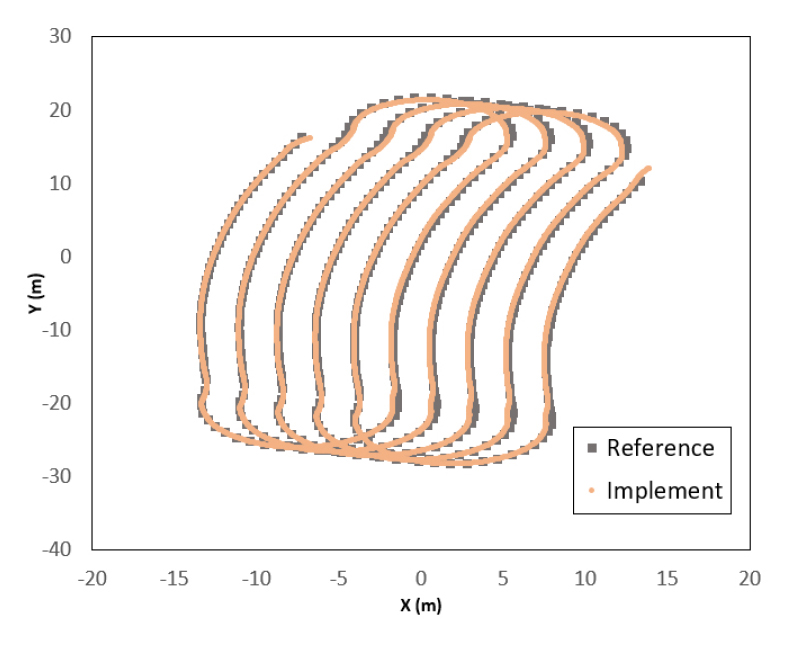
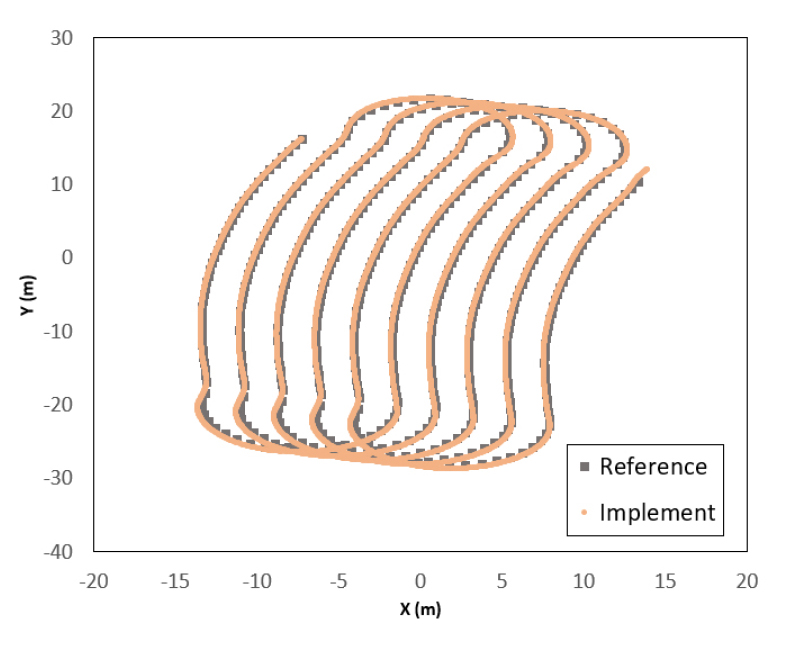
결과는 Fig. 16과 같이 모든 작업 경로열에서 개발한 곡선경로법을 이용하였을 때 개선된 추종성능을 보였고, 특히 Fig. 17과 같이 7번째 열에서 20 cm 이상의 오차를 보였다. 이는 해당 열에서 기준 경로와의 Fig. 18과 같이 방향각 오차가 크게 발생하게 되고, 이에 따라 측면 편차가 커지기 때문에 이와 같은 결과를 보이는 것으로 판단된다. 또한 경로 추종 알고리즘에 곡률 적용 여부에 따라 방향각 오차 계산에 차이가 나게 되는데, 이와 같은 결과는 나타내는 원인 중 하나로 분석되었다. 본 연구에서는 다루지 않지만 농업 환경에서의 작업은 토양의 상태에 따라 작업 효율에 크게 영향을 미치게 되는데, 7번째 열 또는 6번째 선회 구간과 같이 오차가 크게 발생하는 이유는 실험 당시 우천으로 인해 토양의 함수율이 높은 상태였으며, 이러한 환경으로부터 발생하는 동적 요인도 작업 효율에 영향을 미치는 것으로 판단된다.
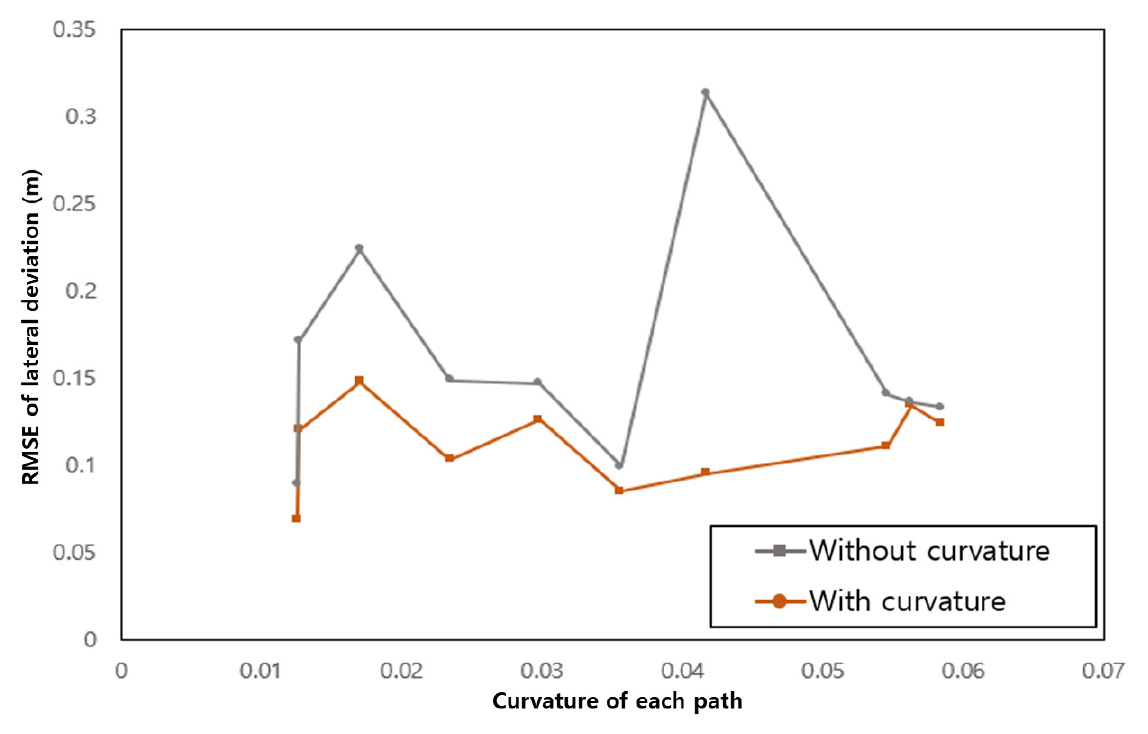
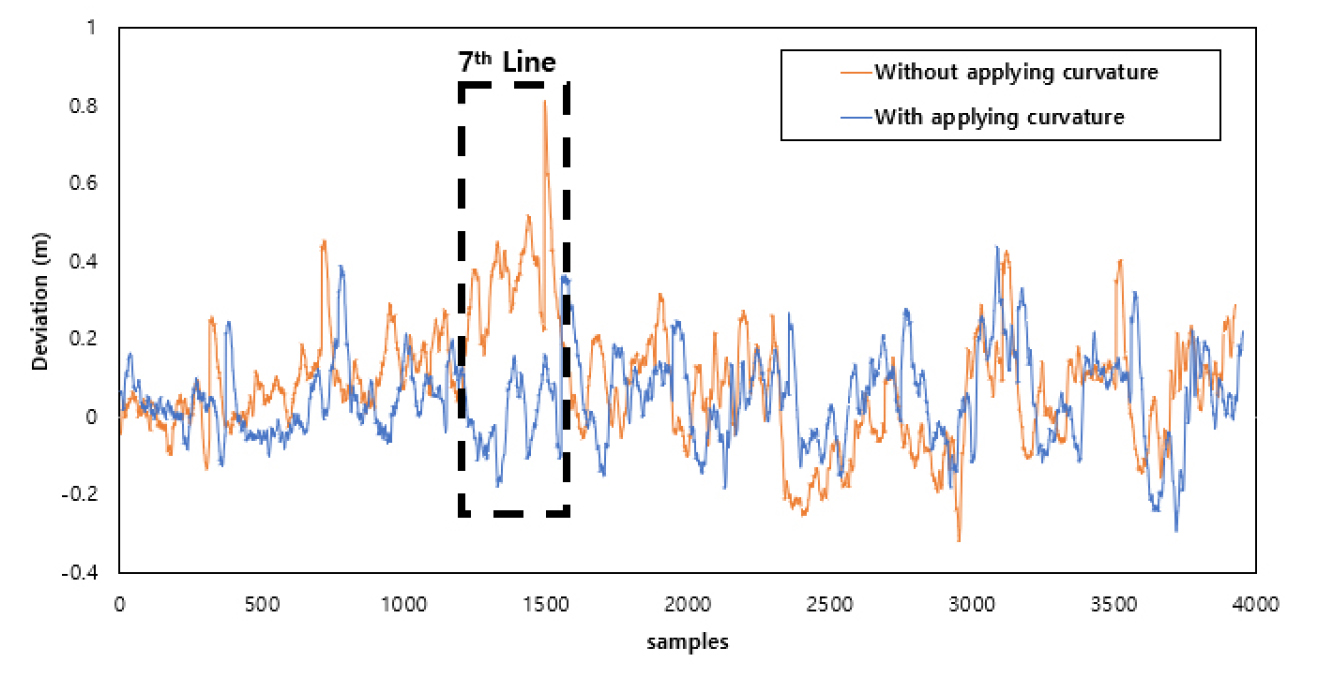
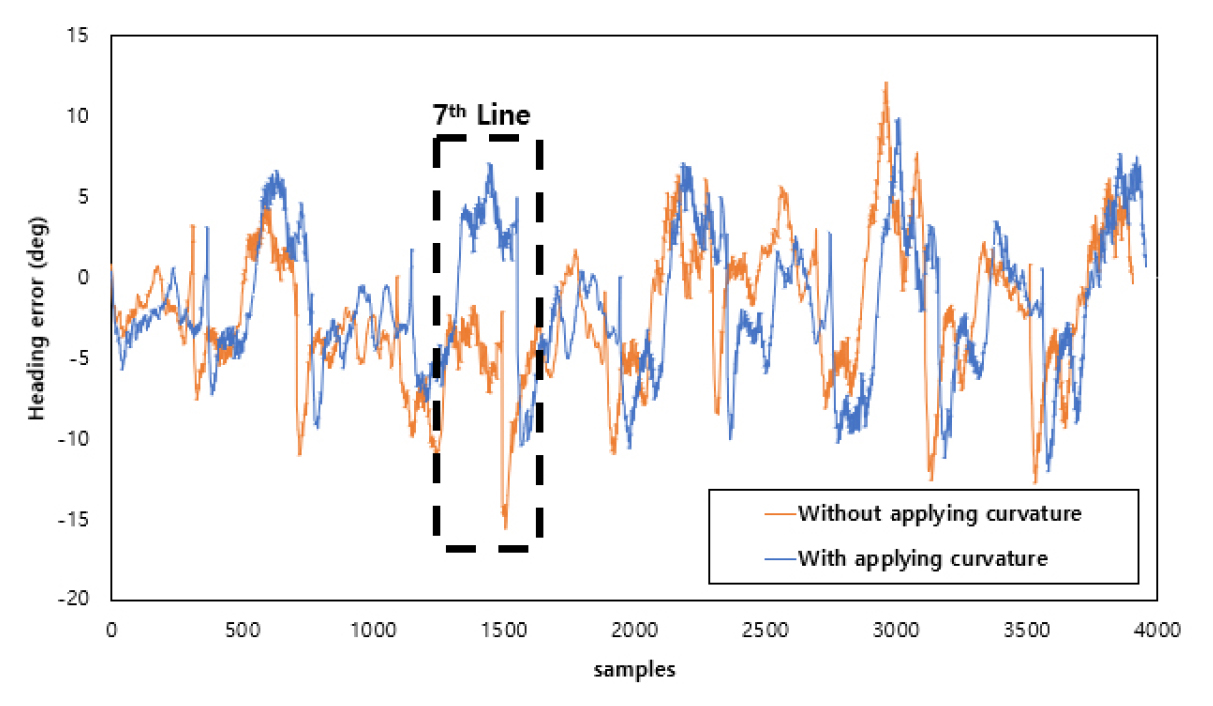
작업 열 구간에서의 곡률 적용 전 측면 편차 RMSE는 17 cm에서 적용 후 11 cm로 감소하였으며, 선회 구간의 경우 곡률 적용 전 측면 편차 RMSE는 33 cm에서 적용 후 21 cm로 감소하였다. 전역 곡선 경로 추종 결과는 Table 5와 같이 곡률을 적용한 경우 방향각 오차가 0.25 deg, 측면 편차가 10 cm 감소한 결과를 보였으며, 작업기 중심을 기준으로 측정된 측면 편차의 경우 최대 27 cm, RMSE 기준 5.8 cm의 차이를 보여 33.7% 향상된 성능을 나타냈다. 또한, Fig. 19과 Fig. 20을 통해 선회 후 작업 경로 진입 구간과 선회 진입 구간에서 곡률이 적용된 경로 추종 알고리즘이 적용되지 않은 알고리즘보다 안정적으로 추종하는 것으로 분석되었다.
Table 6과 같이 시뮬레이션 테스트와 현장 테스트의 결과를 통해 곡률을 적용 후 시뮬레이션 2 km/h와 4 km/h에서 작업기 기준 측면 편차가 각각 37.4%, 38.3% 감소하였고, 현장에서는 작업 경로 기준 33.7%, 전역 경로 기준 38.9%의 측면 편차가 감소하였다.
Table 5.
Comparison of the RMSEs heading error and lateral deviation in the curved working path at 2.5 km/h without and with curvature application.
| RMSEs of | Without curvature | With curvature |
| Heading error (deg) | 5.61 | 5.36 |
| Lateral deviation of working path (m) | 0.17 | 0.11 |
| Lateral deviation of full path (m) | 0.27 | 0.17 |
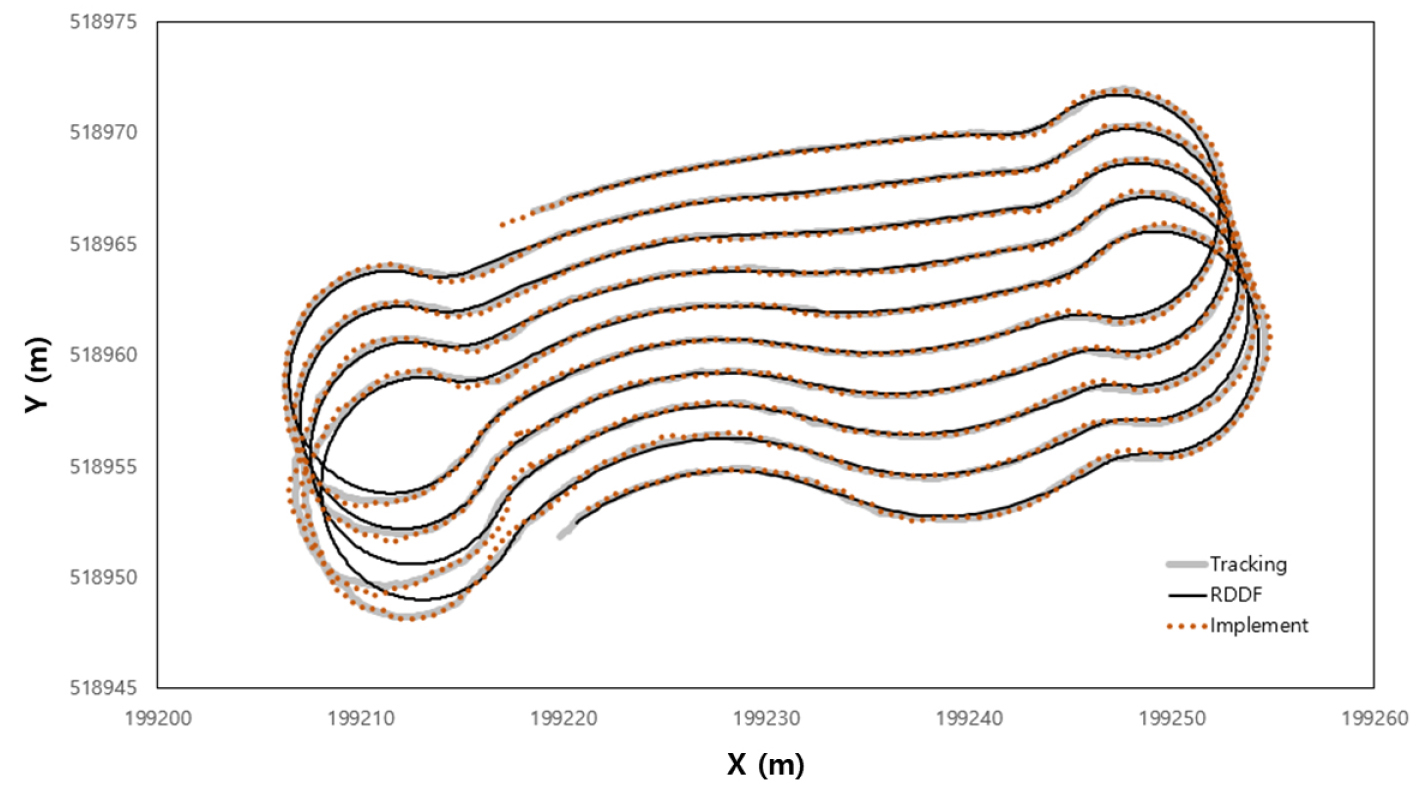
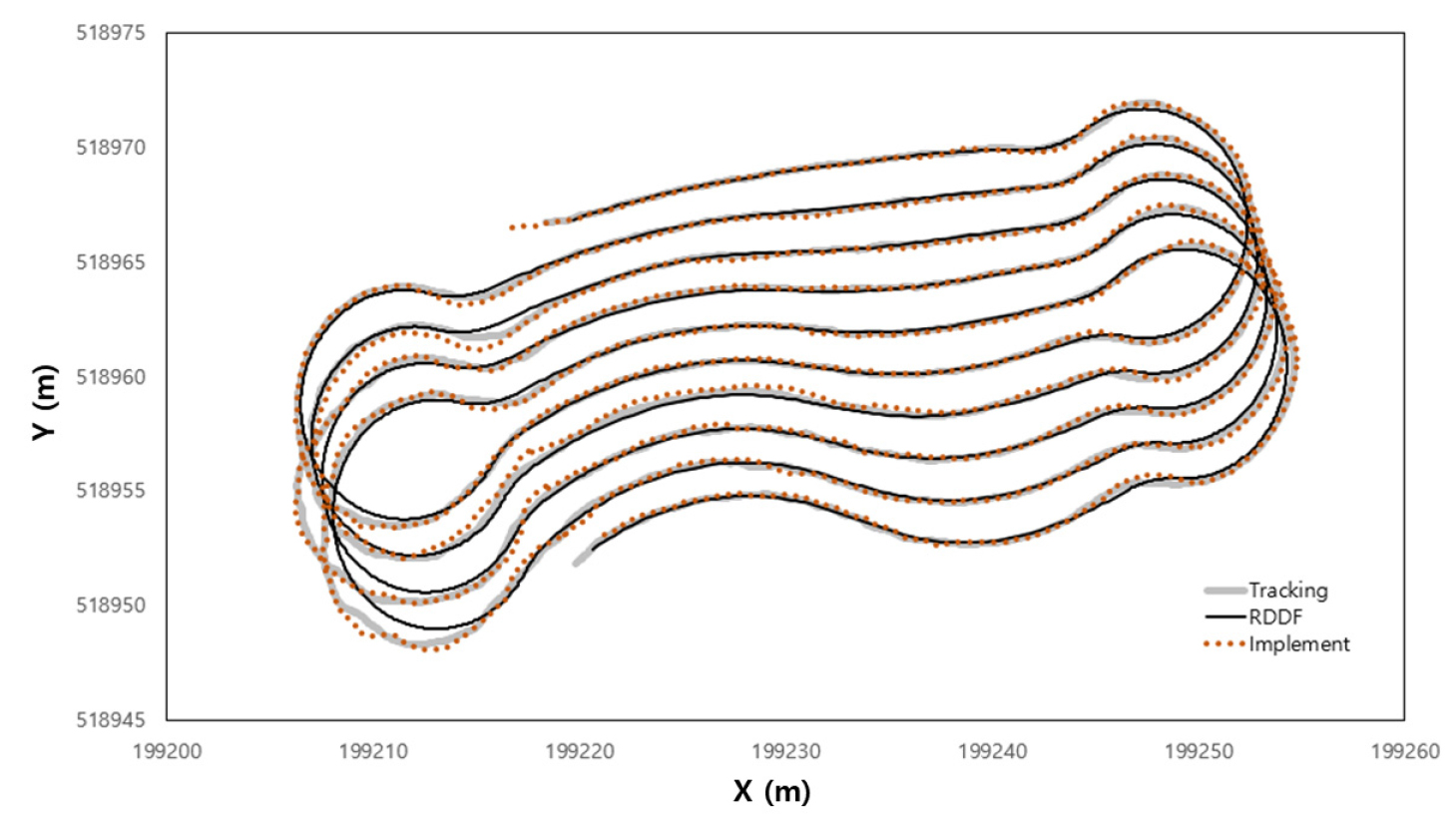
Table 6.
Comparison of improvement rates the RMSEs heading error and lateral deviation in the simulation and field without and with curvature application.
Conclusion
본 논문에서는 기존의 연구되었던 자율주행 트랙터의 국내 밭 환경 적용을 위한 곡선 경로 생성 기술을 개발하고, 생성된 곡선 경로의 곡률을 고려한 작업기 기준 경로 추종 알고리즘을 개발하였다. 경사진 국내 밭의 경우 작업 경로가 다양한 형태의 곡선으로 표현될 수 있기 때문에 농지 경계 또는 작업열을 따라 주행하며 왕복 곡선 작업 경로 생성을 위한 기준 경로를 생성하였으며, 작업폭과 농지의 최대 폭을 고려하여 전역 경로를 위한 추가적인 경로와 선회 경로를 생성하였다. 또한 많은 연구에서 진행된 차량 중심의 경로 추종 방식을 개선하여 정밀한 농작업이 가능하도록 작업기 중심의 경로 추종 알고리즘을 개발하여 경로 추종 중 작업 성능을 향상시키고자 하였다. 곡선 경로는 직진 및 선회로 이루어진 작업 경로와는 다르게 더 안정적인 주행 성능을 필요로 한다. 이에 따라, 개발한 작업기 기준 경로 추종 알고리즘에 곡률 특성을 반영하였다. 개발된 알고리즘은 시뮬레이터 환경에서의 적용을 통해 서로 다른 속도 조건으로 주행하며, 곡률 적용 여부에 따른 작업의 정확도를 분석하였다. 이후 현장 실험을 통해 검증하였고, 실제 농업 환경에서의 적용성을 평가하기 위하여 필드에서 생성된 왕복 곡선 작업 경로를 자율 주행하며 곡률 적용 여부에 따라 기준 경로 대비 작업기 중심의 측면 편차가 33.7% 감소하였고, 자율주행 중 작업구간에서 최대 27 cm가 감소하여 작업 효율과 추종 성능이 향상되었음을 확인하였다.
본 연구에서 개발된 경로 생성 알고리즘과 경로 추종 알고리즘은 주행 경로 기반으로 왕복 곡선 작업 경로를 생성하였다. 이는 수동주행으로 생성된 농지 경계를 제외한 다른 경계에 대해서는 고려하지 않았기 때문에 많은 비정형 농지에 적용 시 선회 경로가 농지를 벗어나는 현상이 발생할 수 있다. 이에 따라, 추후 연구에서는 비정형 농지 전체 경계를 취득 후 농지 경계 데이터가 이루는 비정형 형태의 도형을 근사화하는 알고리즘을 통해 최적의 도형을 생성하고, 해당 농지에 최적화된 직선 또는 곡선으로 이루어진 경로 생성 알고리즘이 필요하다. 또한, 트랙터의 최소 회전 반경 또는 최대 조향각을 고려하여 생성된 곡선 경로를 보정하고, 차량의 실시간 위치와 경로의 위치를 통해 기준 경로와의 곡률을 계산하고 경로 추종 방식에 적용할 수 있는 정밀한 자율주행 기술이 적용된다면 자율주행 트랙터의 적용성은 더욱 확대되고 기술 고도화에 기여할 수 있을 것으로 기대된다.
