

Introduction
Materials and Methods
자율주행 내비게이션 시스템
경로 추종 시스템 설계
유압 편차 보상 알고리즘
자율주행 플랫폼
INS System (GNSS/IMU)
EPS System
현장 실험 구성
Results and Discussion
유압 편차 보상 알고리즘 유효성 검증
기대별 유효성 현장 평가 결과
Conclusion
Introduction
전 세계적으로 농업 분야에서 자율주행 시스템에 대한 관심이 증가하고 있다. 자율주행은 정밀 농업의 핵심 기술 중 하나로써 최근 몇 년 동안 자율주행 농기계를 통한 노동력 절감 및 농업 생산 향상에 큰 기여를 하고 있다(Adhikari et al., 2020; Jeon et al., 2024). 실제 농업 현장에서 운전자는 농기계를 수동으로 조향하면서 3점 히치 상·하강 등 농작업을 동시에 수행해야 하기 때문에 어려움과 상당한 작업 피로도가 발생한다. 이에 따라 농기계의 자동 조향 시스템이 요구되며, 고가의 자율주행 농기계뿐만 아니라 기존 농기계에 탈부착 가능한 자동 조향 시스템(NX510, CHCNAV, China; AT2, FJDynamics, China; PLUVA Auto, GINT, Korea; AGMO Solution Kit, AGMO, Korea)이 개발되어 상용화되고 있다. 탈부착식 자동 조향 시스템은 기존 트랙터의 조향 휠(혹은 핸들)을 탈거하고 전동식 동력 조향 장치(Electric Power Steering, EPS)를 부착하여 자동 조향을 수행함으로써 목표한 경로를 따라 자율주행할 수 있다(Peng et al., 2024). 이때, 자율주행 농기계의 경로 추종 정확도는 농작업 성능에 많은 영향을 미치기 때문에 농업에 적합한 자동 조향 제어 기술이 매우 중요하다(Rovira-Más, 2010).
트랙터는 일반적으로 정유압 조향(Hydrostatic steering) 방식을 사용하고 있는데 누유 현상, 조향 액추에이터의 비선형적인 반응이나 데드 타임(Dead time)으로 인해 조향 편차가 발생할 수 있다(Han et al., 2015; Lee et al., 2022). 조향 편차가 발생할 경우, 자동 조향 시스템에서 경로 추종의 정확도는 현재 차량의 정확한 조향각 측정과 직접적으로 관계되어 있다(Reid et al., 2000; Yin et al., 2020). 트랙터의 전륜 조향축에 조향각 센서(Wheel angle sensor)를 부착하여 조향각을 직접 측정하거나, 지구 위성 항법 시스템(Global Navigation Satellite System, GNSS)과 조향축에 관성 측정 장치(Inertial Measurement Unit, IMU)를 장착하여 조향각을 예측하는 연구들이 진행되어 왔다(Miao et al., 2018; Wang et al., 2022a). 그러나, 추가적인 센서 사용으로 인한 비용이 발생하며 정확한 설치, 외부 노출로 인한 유지 및 보수 등의 한계가 존재한다.
한편, 앞서 언급한 농기계의 조향 특성뿐 아니라 외부적인 요소가 경로 추종 정확도에 영향을 미칠 수도 있다. 농작업 환경은 불균일한 토양, 작업기의 부하, 토양 미끄러짐 등으로 인해 외란이 많이 발생하기 때문에 외란에 강인한 경로 추종을 위한 다양한 제어 기술이 연구되어 왔다. Miao 등(2022)은 슬라이딩 모드 제어(Sliding Mode Control, SMC) 기반의 트랙터 자동 조향 시스템을 개발하여 외부 외란에 대한 안정성을 평가하였으나, 실제 현장 실험을 통한 적용 가능성은 보여주지 못하였다. He 등(2022)은 모델 예측 제어(Model Predictive Control, MPC) 기술을 적용하여 미끄러운 논 환경에서 실험을 통해 경로 추종 성능을 확인하였다. 이러한 피드백(Feedback) 혹은 적응형(Adaptive) 제어 방식의 경우, 외란에 대한 정확도와 강인함을 향상시킬 수 있지만 계산 복잡성을 희생시키면서 실시간 조향 제어에 방해가 될 수 있다(Sun et al., 2022).
본 연구에서는 추가적인 센서의 장착 없이 외란을 보다 빠르게 제거할 수 있도록 피드포워드(Feedforward) 방식을 활용하여 유압 시스템에서 발생된 조향 편차를 보상하고자 하였다. 설치된 조향 모터의 현재 값을 바탕으로 바퀴의 정렬을 나타내는 중심 값을 횡방향 거리오차와 방향각 오차를 통해 추정하면서 조향 시스템에서 발생된 조향 편차를 실시간으로 자동 보상하는 알고리즘을 개발하였다. 실제 농업 현장에서 다양한 트랙터에 개발한 알고리즘을 적용해보고, 경로 추종 수렴 성능을 평가하였다.
Materials and Methods
자율주행 내비게이션 시스템
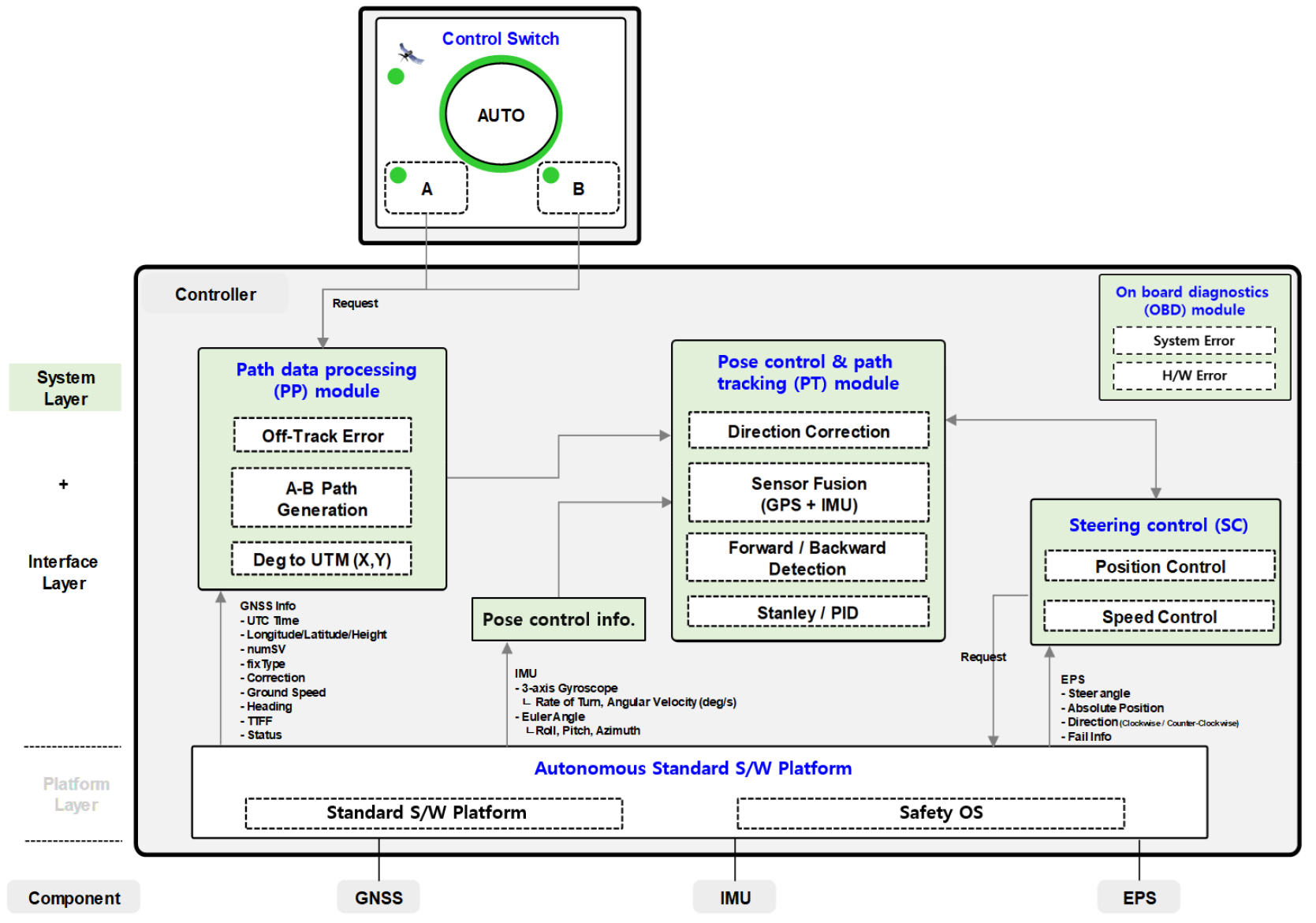
Fig. 1은 전체적인 시스템의 구조를 보여준다. 먼저, 표준 소프트웨어 플랫폼에는 GNSS, IMU(Inertial Measurement Unit), 전동식 동력 조향 장치(Electric Power Steering, EPS) 등의 입출력 정보를 관리할 수 있는 플랫폼 레이어(Platform layer)를 구성하였다. 사용자로부터 경로 생성을 위한 정보를 입력 받는 제어 스위치(Control switch) 부분과 해당 정보를 바탕으로 경로 생성(Path planning) 모듈이 작동된다. 표준 소프트웨어 플랫폼 에서의 센서 정보 데이터를 바탕으로 항체의 위치와 방향을 모니터링하고 자세 제어를 수행하기 위한 경로 추종(Path tracking) 모듈이 구성되었다. 여기에 센서 융합(Sensor fusion) 기법과 전진과 후진을 감지하는 알고리즘이 적용되었다. 또한, 해당 모듈에서 제어 모듈을 적용할 수 있는 시스템을 구성하였고, 본 연구에서는 차량의 후륜축 중심을 기준으로 하는 퓨어-퍼수잇(Pure-Pursuit) 알고리즘의 전방 주시 거리(Look-ahead distance) 설정의 한계를 극복하기 위해 스탠리(Stanley) 알고리즘과 PID 제어기(Proportional-Integral-Differential controller)를 결합하였다. 스탠리 알고리즘은 전방 주시 거리의 설정 없이 차량의 전륜축 중심을 기준으로 트랙터의 횡방향 거리 오차와 방향각 오차를 동시에 고려하여 더 안정적인 제어를 가능하게 하고, PID 제어기는 빠른 응답성과 기민한 제어 성능을 제공한다(Wang et al., 2022b; Huang et al., 2023). 조향 제어(Steer control) 모듈은 입력 받은 목표 제어 위치 값을 위치로 제어할 것인지, 속도로 제어할 것인지 결정하여 최종적으로 전동기에 명령을 가해주는 역할을 수행한다.
경로 추종 시스템 설계
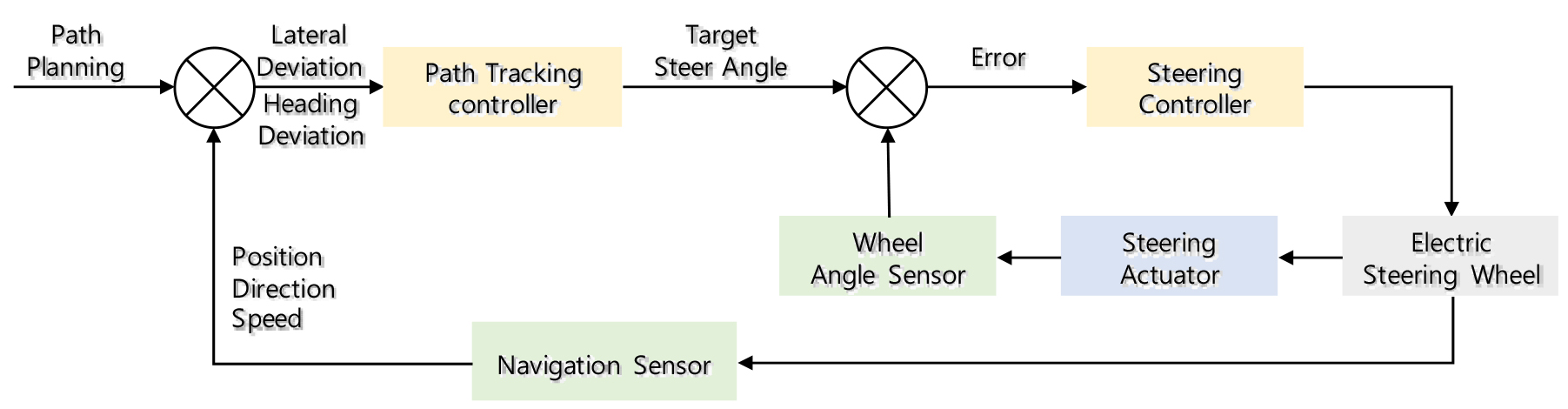
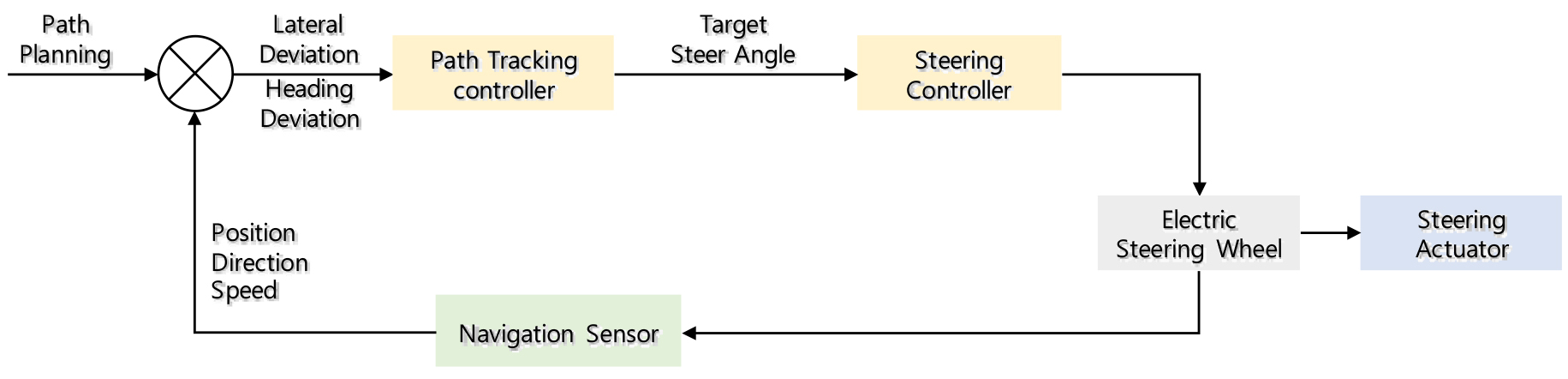
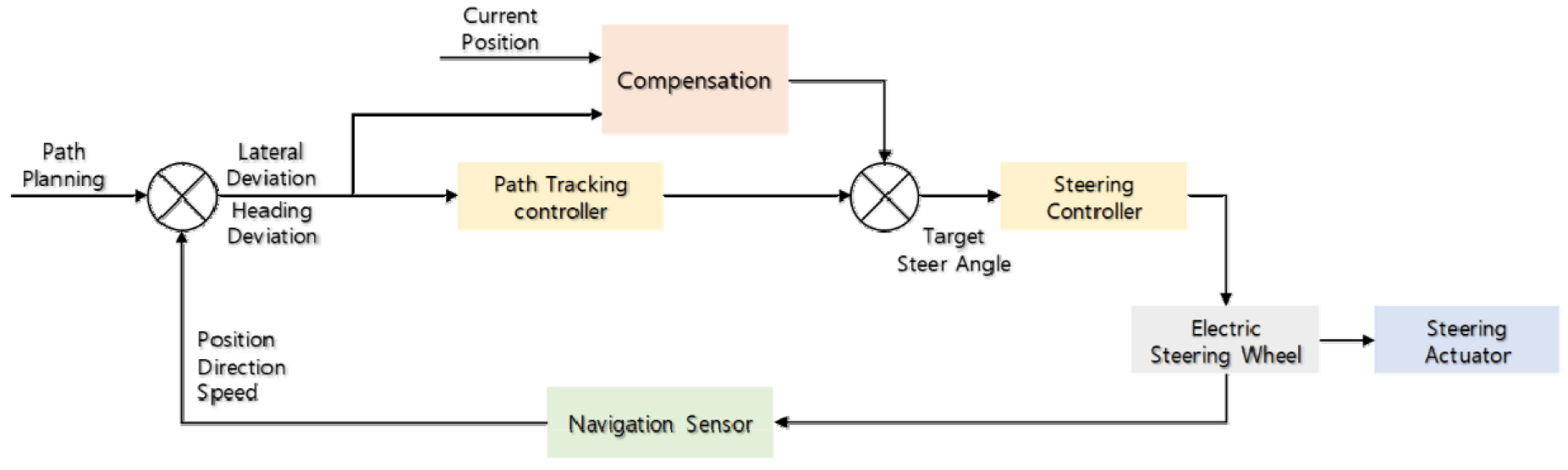
Fig. 2는 차량 속도, 조향 각도 등을 피드백 받아 제어하는 경로 추종 제어 시스템의 블록 선도이다. 이러한 시스템 구성에서 횡방향 오차에 대한 비선형 피드백 제어로 목표 조향 명령을 입력해 차량의 원하는 경로를 추종하게 하는 스탠리 알고리즘을 적용할 수 있다. 피드백 제어 시스템에서는 차량의 제어 목표 값을 도출하기가 다소 용이하지만 외란에 강인하지 않다. 한편, Fig. 3와 같이 조향 각도를 피드백 받지 않고 제어하는 피드포워드 방식에서는 차량의 주행 방향은 항법 시스템으로 추종할 수는 있으나, 제어 초기 시점의 정확한 조향 각도는 알 수 없다. 이는 횡방향 오차와 방향에 대한 오차를 기반으로 목표 방향을 계산하여 목표 제어 각도를 산출할 수 있지만, 실제적인 제어 성능은 피드백 시스템에 비해 저하가 된다. 이러한 한계를 개선하고 실시간으로 보상해주기 위해 Fig. 4와 같이 조향각 센서가 없는 상황에서 횡방향 오차와 방향각 오차와 함께 추가적으로 EPS 모터의 위치 상태 값을 입력 받고 실시간으로 유압 편차 보상 알고리즘을 적용하여 추종 성능을 개선할 수 있도록 설계하였다.
유압 편차 보상 알고리즘
Fig. 5는 RTK(Real Time Kinematic)-GNSS가 장착된 트랙터(MR1007, Kubota, Japan)를 사람이 직접 운행하며 작업을 수행한 경로 상의 위치 데이터를 나타낸 결과이다. 실제 약 90 m ~ 100 m 사이의 직선 작업 구간만 추출하였고, 총 9개 직선 라인과 회전 작업까지 고려하여 약 1 km 주행한 결과를 표기하였다. 이와 같이 모터의 현재 위치 값이 지속적으로 한쪽 방향으로 편향이 되는 현상을 확인할 수 있었다.
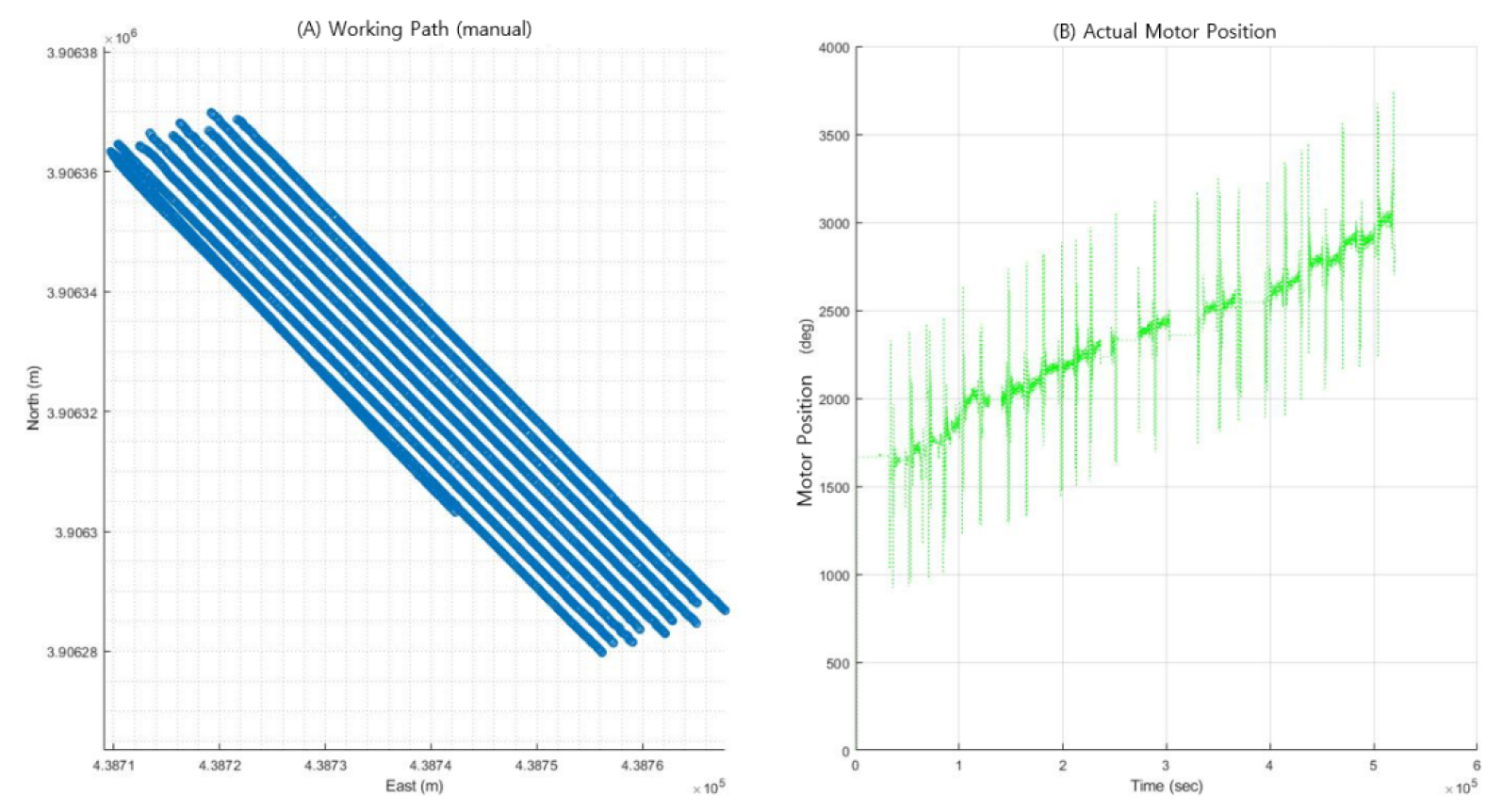
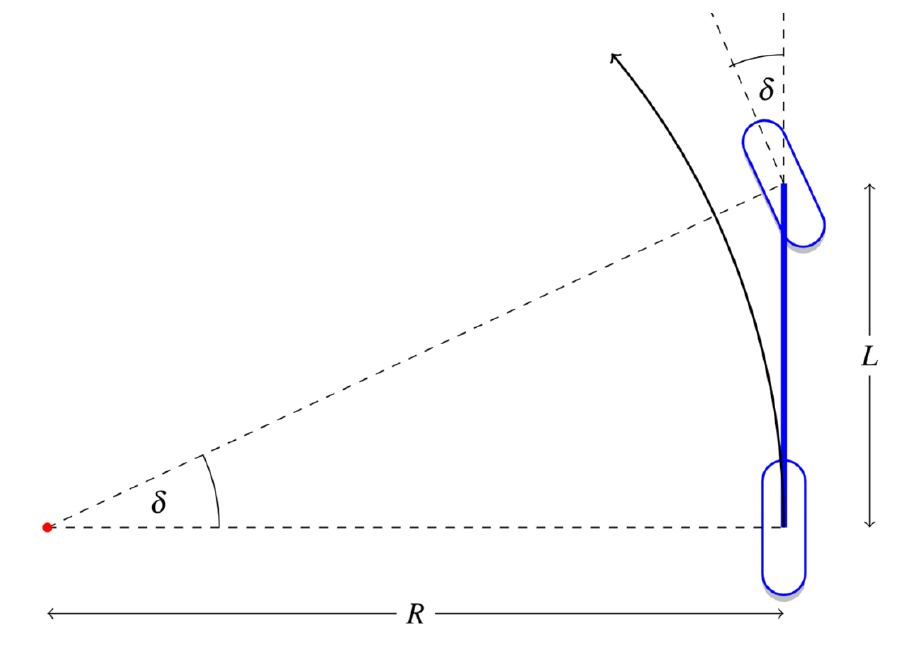
이러한 편차가 발생되는 현상으로 인해 경로 추종 제어기에서 계산된 제어 목표 값만으로는 정밀 제어의 한계가 발생하게 된다. 피드포워드의 한계를 Fig. 6과 같은 유압 편차 보상 알고리즘을 적용하여 제어 정밀성을 높이고자 하였다. 먼저, 밭작물의 작업시에는 대부분 핸들을 과도하게 꺾는 현상은 없다는 가정 하에 현재 모터 엔코더로부터 출력되는 위치값()를 기반으로 모터 평균값()을 큐(Queue) 형식으로 처리하여 조향 바퀴의 중심을 1차적으로 예측한다. 즉, 차량의 직진 주행 성능이 오차가 0에 수렴하지 않는 정상 상태(Steady state)를 유지할 때, 그때의 모터 평균값을 조향 바퀴의 중심으로 가정한다. 하지만 이 상태를 벗어나거나 혹은 모터 평균값과 현재 모터값의 차이가 클 경우, 조향이 특정 방향으로 치우쳐졌거나 모터 드리프트(Drift)가 발생한 상황으로 가정한다. 이를 바탕으로 현재 모터 평균값과 실시간 현재 모터값의 차이를 계산하는 비교 연산하는 과정을 거치게 된다. 계산 결과는 바로 피드백 시스템에서 바퀴의 조향값과 현재 조향 장치의 차이를 대략적으로 모사한 부분으로 볼 수 있다. 마지막으로 경로 추종 제어기에서 연산된 목표값()에 보정값()을 가감하고, 피드포워드 제어 방식에서 조향 모터의 최종 목표 값 ()을 산출하여 제어를 수행하는 방식으로 구성하였다. 보정값은 식 (1)과 같이 트랙터를 전륜 조향 및 후륜 구동인 Fig. 7과 같은 자전거 모델(Bicycle model)의 회전 반경(Turing radius)과 차량의 축간거리(Wheelbase)의 관계로 구성된 값으로 결정하였다.
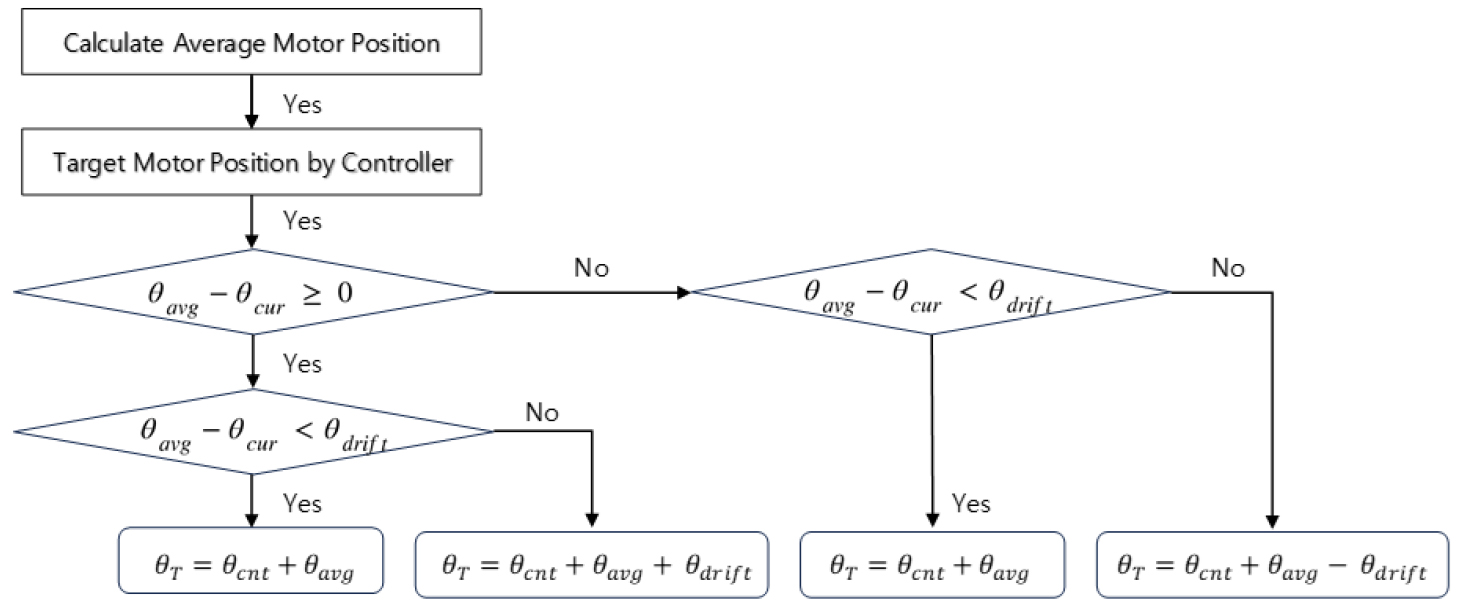
Where, : Compensation value for motor drift, : Wheelbase, : Turning radius.
자율주행 플랫폼
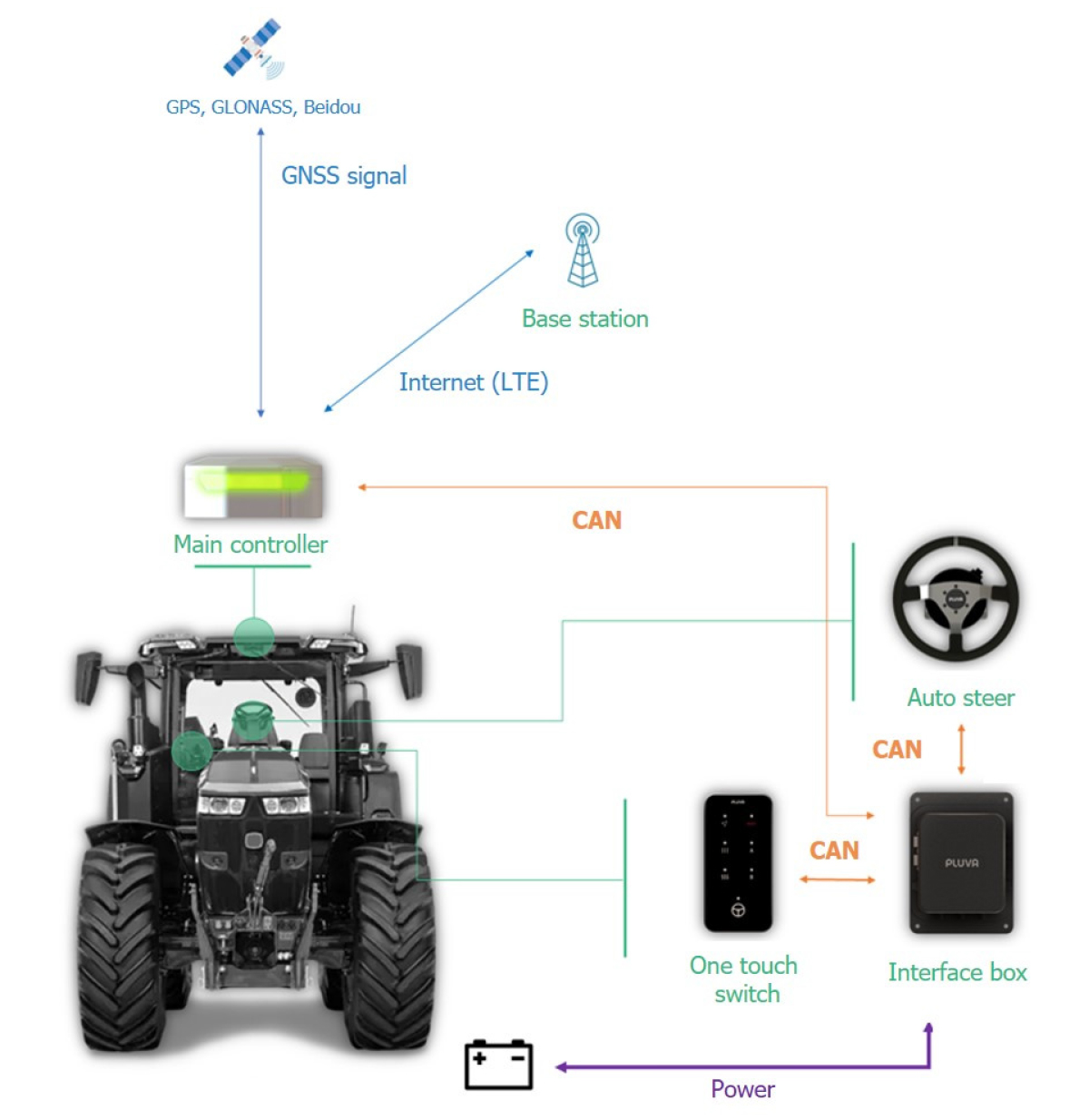
본 연구에서는 GNSS/INS(Inertial Navigation System), LTE 통신 모듈 그리고 LTE/GPS 2-IN-1 안테나가 메인 컨트롤러 안에 내장되어 있어 RTK 플랫폼 사업자로부터 제공된 정밀 측위 보정정보 데이터를 LTE 통신망을 통해 수신하여 cm 수준의 경도/위도 등의 데이터들을 획득하였다. 단일 안테나를 사용하였고 Fig. 8과 같이 자율주행 시스템의 전원을 배분하기 위한 인터페이스 박스를 비롯하여, 핸들을 작동시키는 오토 스티어, 경로를 생성하기 위한 원터치 스위치, 그리고 정밀 측위하기 위한 메인 컨트롤러 하드웨어 장치를 구성하였다.
INS System (GNSS/IMU)
Table 1에 정리한 바와 같이 정밀 측위 시스템 솔루션을 제공하는 RTK-GNSS와 보급형 IMU를 사용하였고, LTE 기반 네트워크 RTK 기술을 이용하여 보정정보를 주기적으로 수신하도록 하였다. 하지만, GNSS 시스템에서 제공되는 항법 시스템 정보만으로 알고리즘에 적용하기에는 신호의 잡음이 높고, 성능이 높은 수준의 IMU가 아닌 보급형 수준의 IMU 정보(자이로스코프, 가속도계, 지자기센서)를 가지고 항법 알고리즘을 만들기에는 누적 오차가 발생하기에 제어 성능 향상에 한계가 존재하게 된다(Li Y. et al., 2012). 이에 칼만필터 기법을 적용한 GNSS/IMU의 INS를 구축하였고, 이러한 관성 항법 장치 시스템을 구성하여 항체의 위치와 자세 정보를 보다 정확하게 획득할 수 있도록 구성하였다.
Table 1.
Specifications of the GNSS/IMU/LTE integration system.
EPS System
트랙터 바퀴를 제어하기 위해 기존의 조향 장치를 탈거하고 조향 축에 전동기를 체결하여 트랙터 바퀴를 제어할 수 있는 전동식 동력 조향 장치를 사용하였다. 이에 대한 제원은 Table 2와 같다.
Table 2.
Specifications of the EPS system.
현장 실험 구성
본 연구를 적용하고 기초 검증하기 위해 93.5 kW 트랙터(HX1200, Daedong, Korea)를 사용하였다. 추가적으로 최종 알고리즘을 다양한 기대에 적용시 유사한 성능이 나오는지 검증하기 위해 오비트롤 조향 시스템으로 구성된 48 kW 트랙터(Luxen65, Kukje, Korea), 51 kW 트랙터(YT470, Yanmar, Japan), 그리고 93.5 kW 트랙터(MR1007, Kubota, Japan)에서 시험을 진행하였다. 해당 트랙터에 단일 안테나로 구성한 정밀 측위 시스템과 스티어링 휠을 제어하기 위한 모터 형태의 EPS를 이용하였다. 조향 센서를 설치하지 않고 외란을 즉시 제거하기 위해 피드포워드 방식의 제어 방식에 학습 알고리즘을 적용하였다.
실험은 목표지점으로 제어가 이루어지는지 GNSS 데이터를 수집하며 진행하였고, 그 결과 정유압 방식의 트랙터 특성으로 인해 제어가 목표지점으로 수렴하지 않음을 확인할 수 있었다. 이에 바퀴의 정렬을 예측하고 제어해야 함이 추종 성능을 높일 수 있을 것으로 판단하여 EPS의 현재 위치 값을 실시간으로 확인하면서 조향 바퀴의 중심 위치를 일차적으로 예측하고, 회전 반경과 축간 거리와의 관계로 이론적인 조향 값을 산출한 뒤, 이를 보정값으로 삼아 스탠리 알고리즘으로 도출된 조향값에 가감해주는 형태의 제어를 구성하였다.
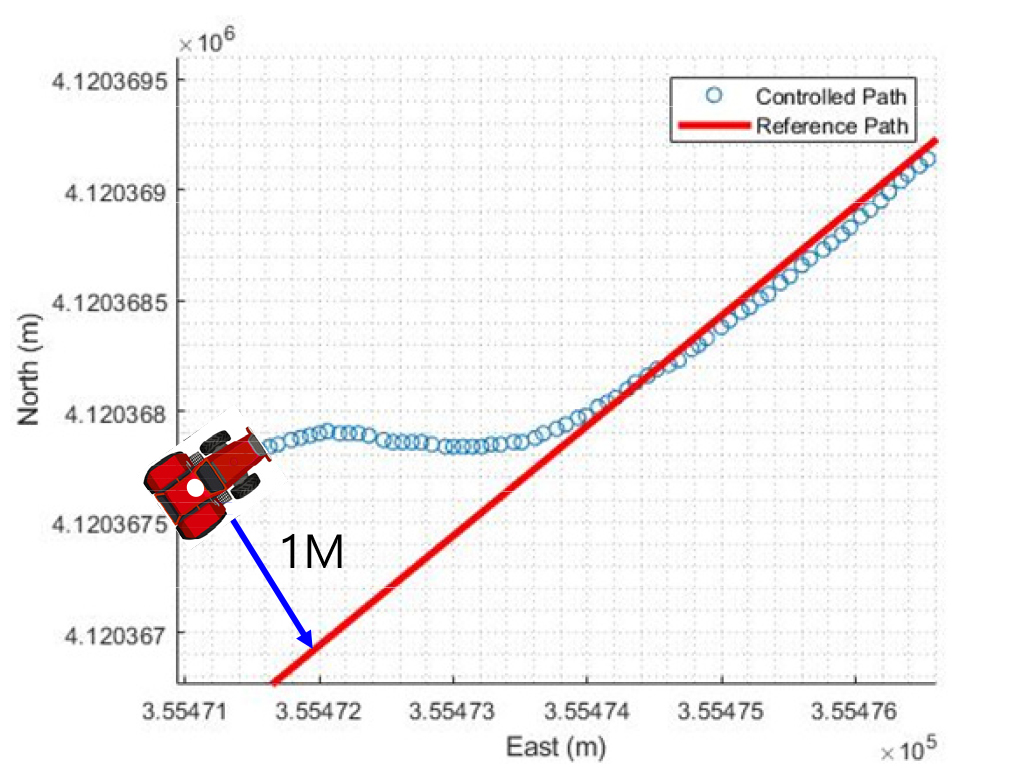
알고리즘의 유효성을 확인하기 위해 동일한 환경 조건에서 알고리즘 적용 전과 적용 후의 차량 제어를 비교하고자 하였다. 이때 사용한 트랙터는 앞에서 설명한 대동 HX1200 모델을 사용하였고, 차량 속도는 2.5 km/h의 동일한 속도로 시험을 진행하였다. Fig. 9과 같이 기준 직선 경로에서 좌측 1 m 정도 떨어진 지점에서 차량을 정렬시킨 후, 기준 경로에 수렴하는 거동을 살펴보고자 하였다. 편차 보정 알고리즘 적용 전과 후의 경로는 동일한 라인에서 주행하며 각각 3번씩 평가를 진행하였다. 실험결과는 횡방향 거리오차와 방향각 오차에 대하여 평균 제곱근 오차(Root Mean Square Error, RMSE)로 분석하였다.
Results and Discussion
유압 편차 보상 알고리즘 유효성 검증
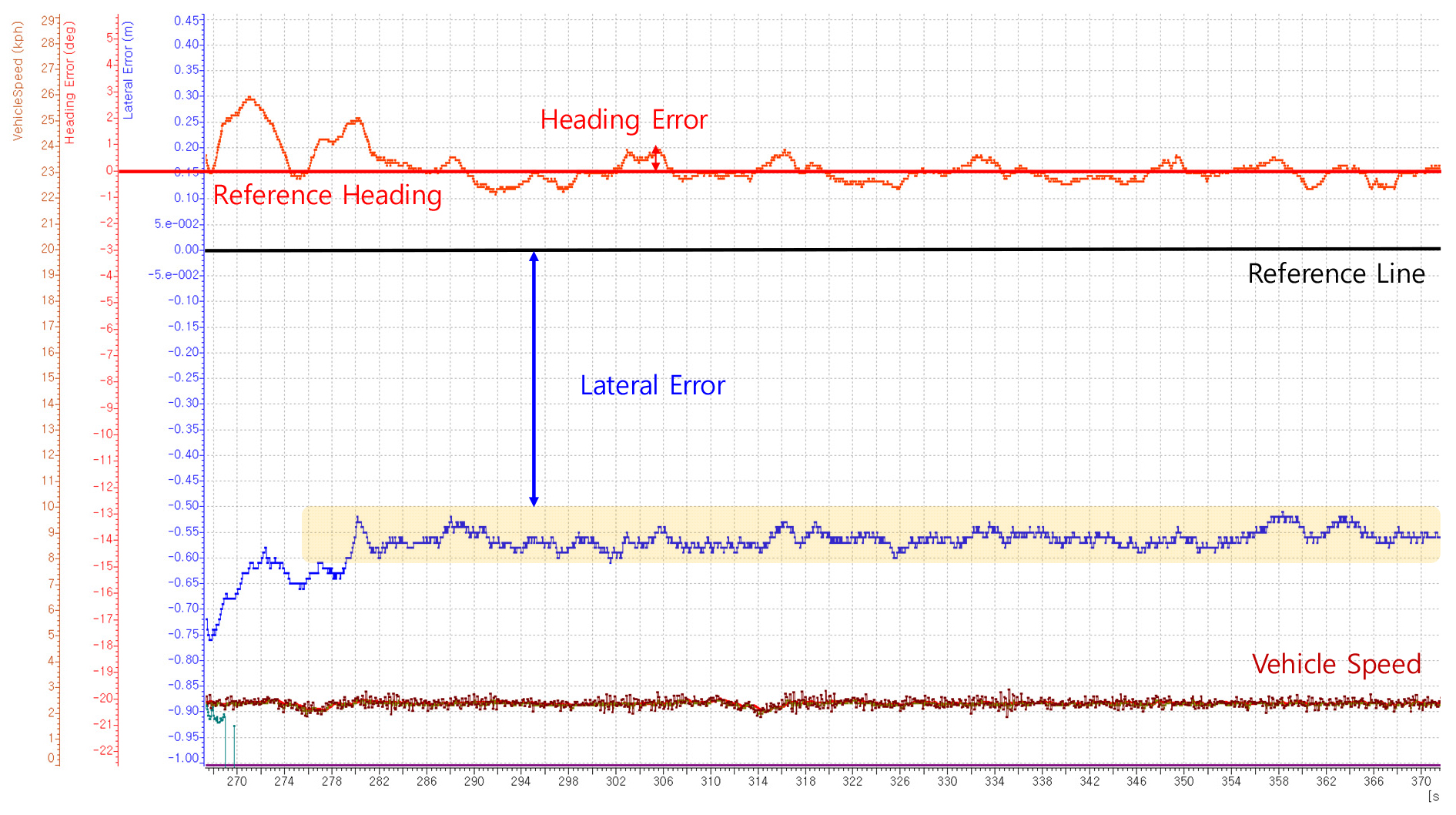
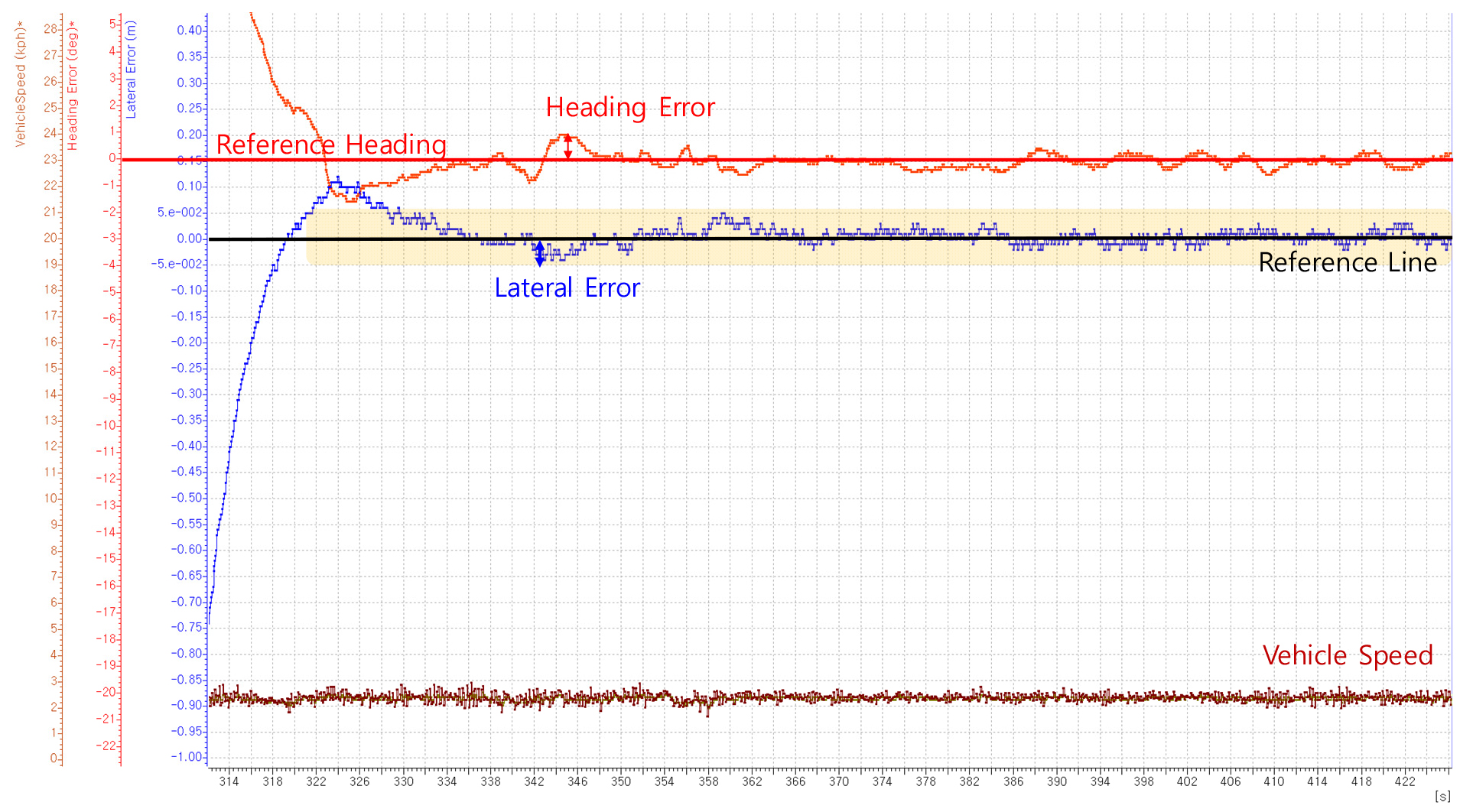
Fig. 10는 모터 핸들에 편차를 발생시킨 상태에서 보정 알고리즘을 적용하지 않은 상태의 자율주행을 수행한 결과이다. 결과적으로 방향각 오차(Heading error)는 정상적인 목표 값에 도달하였으나, 횡방향 거리오차(Lateral error) 값은 특정 영역으로 수렴한 뒤 더 이상 기준경로(Reference line)에 도달하지 못한 채로 주행이 됨을 확인할 수 있었다. 이는 피드백 제어 시스템에서 조향각 센서 값 정보를 입력 받아 보정해 주는 부분이 없기 때문에 목표 조향 각도가 유효하지 않은 제어 값임을 이해할 수 있다. 이러한 한계가 있기에 직접적으로 조향각을 알 수는 없지만 지속적으로 현재 모터 값과 모터의 평균적인 거동 측정의 비교 연산을 통해 연속적으로 학습을 시키고 제어기에서 나온 모델의 모터 목표 위치 값에 이를 실시간으로 가감해주며 제어한 결과 Fig. 11과 같이 목표라인에 수렴하는 결과를 확인할 수 있었다.
기대별 유효성 현장 평가 결과
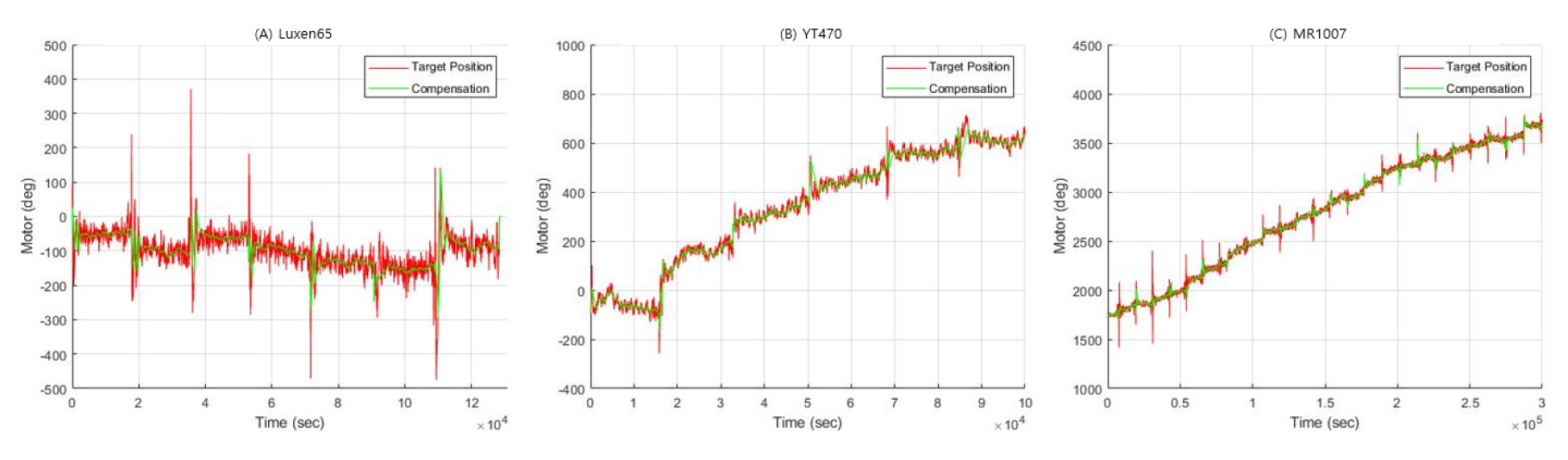
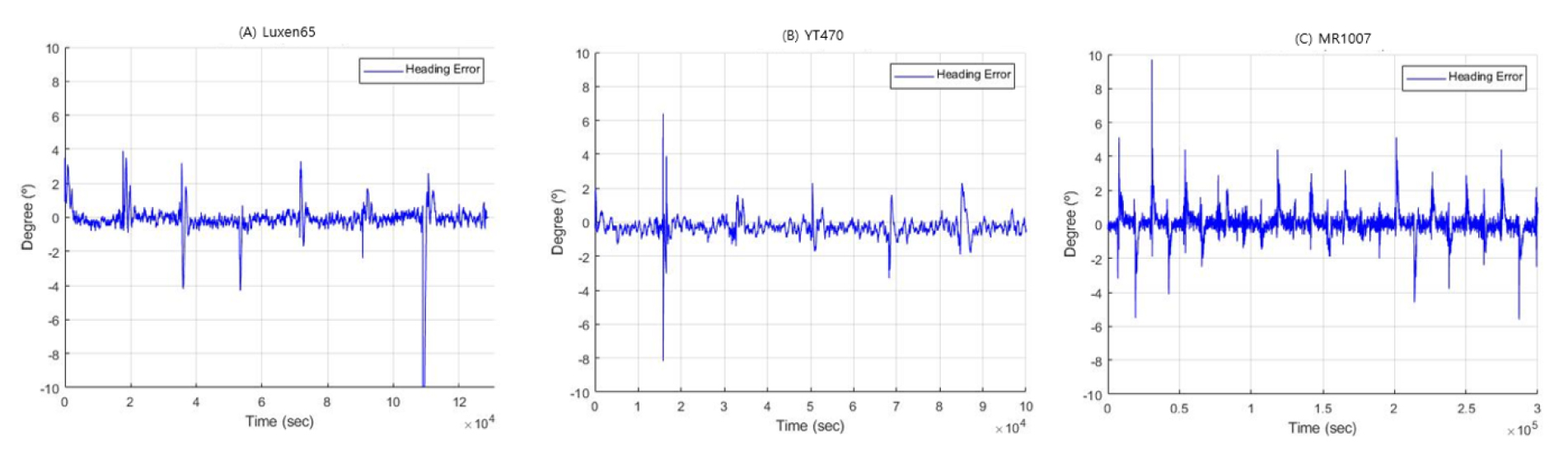
유압 편차 보정 알고리즘과 모터 제어 응답성 개선안을 가지고 다양한 기대에서 유효한지를 확인하고자 마력별로 실제 현장에 적용해보았다. 실험에 사용된 3개의 기대에서 실제로 얼마만큼의 유압 편차가 발생하는지, 작업 속도 영역에서 편차에 따른 모터 제어 보상 알고리즘이 유효하게 적용이 되는지를 살펴보고자 하였다. 각 트랙터별 EPS 모터의 거동인 Fig. 12를 살펴보면 자율주행시 Luxen65의 경우 유압의 편차가 약 200 deg 범위 안에서 제어되고 있음을 확인할 수 있었다. Y470의 경우에는 직진 작업 시 EPS 모터 값이 한쪽 방향으로 계속 증가하는 추세를 확인할 수 있었다. 또한, MR1007에서는 보다 많은 작업을 통해 유효성을 확인할 수 있었는데, 26개의 작업열을 주행한 결과 Y470과 유사하게 EPS 모터 값이 한쪽 방향으로 계속 증가하는 추세를 확인할 수 있었고, 한 작업 구간 당 약 76.9 deg 정도의 핸들 편차가 발생되었음을 분석할 수 있었다. 각 트랙터별 횡방향 거리오차와 방향각 오차는 Figs. 13~14과 같은 거동을 보였다. Table 3과 같이 Luxen 65의 경우 횡방향 거리오차는 3.5 cm, 방향각 오차는 1.062 deg, YT470의 경우 횡방향 거리오차는 2.0 cm, 방향각 오차는 0.552 deg, MR1007의 경우 횡방향 거리오차는 3.1 cm, 방향각 오차는 0.746 deg 결과를 나타내었다.
Conclusion
본 논문에서는 조향각 센서의 장착 없이 피드포워드 방식의 유압 편차 보상 알고리즘을 개발하여 농작업 환경의 특성을 고려한 급격한 외란 발생 시 보다 빠르고 정확한 제어 방법을 제안하였다. 조향각 센서를 장착하지 않고 횡방향 거리오차와 방향각 오차를 고려한 제어방식으로 경로 추종 시 목표 경로에 도달할 것으로 예상되었으나, 바퀴의 조향 각도를 계측할 수 없는 상황에서 정유압 방식의 조향 시스템의 조향 핸들의 중심과 조향 바퀴의 중심이 일치하지 않고 계속 편차가 누적되면서 목표로 하는 경로에 추종하지 못한 상태에서 제어 평형을 이루어 수십 cm 오차를 갖고 수렴하게 되는 것을 실험을 통해 확인할 수 있었다. 조향각 센서 없이 횡방향 거리 오차와 방향각 오차를 고려한 제어 방식으로 경로를 추종하려 했으나, 조향 핸들과 바퀴 중심의 불일치로 인해 편차가 누적되었다. 그 결과, 목표 경로에 도달하지 못하고 수십 cm 오차 범위에서 제어 평형 상태로 수렴하는 것을 실험을 통해 확인하였다. 이는 정유압 조향 시스템이 적용된 농업 기계에서 피드백 시스템으로 구성하지 않을 경우 직진성을 유지할 수 없다는 한계가 있다는 것을 의미한다. 또한, 연구 목적인 외란에 기민한 제어성을 확보하기 위한 피드포워드 시스템에서는 조향 바퀴의 중심을 최대한 정확하게 예측하고 조향 편차에 대한 학습이 반드시 필요함을 확인할 수 있었다. 조향각 센서가 없는 상태이기에 조향 바퀴의 각도를 측정할 수 없는 상황이어서 이를 예측하기 위한 방법이 필요하였고, 이에 일차적으로 실시간 EPS로부터 나오는 현재 조향의 위치 값과 이를 평균화시키면서 조향각의 중심을 예측하였다. 이후 트랙터 기대의 제원인 축간거리와 회전반경을 바탕으로 학습량 값으로 적용하여 실시간으로 바퀴의 중심을 추론하면서 제어함으로써 피드포워드 시스템에서 목표로 하는 경로에 추종하지 못하는 문제를 해결할 수 있었다. 그 결과, 단일 안테나 환경에서 조향각 센서 없이도 직진 추종 성능의 수준이 횡방향 거리오차 기준 2.5 cm 오차 범위 안으로, 방향각 오차 1.062 deg 범위 안에서 제어됨을 통해 피드포워드 제어의 장점인 외란에 기민하게 반응하고, 정유압 조향 시스템상의 한계를 개선할 수 있었다. 본 연구에서 개발된 알고리즘과 최적화 방안으로 직진 자율 추종 성능을 평가해 보았으며, 추후 연구에서는 선회 제어나 고속 주행 등의 다양한 조건에서 현장 평가가 필요할 것이다.
