

Introduction
휴머노이드 로봇의 분류 및 기술 발전 동향
주요 휴머노이드 로봇의 기능 및 응용 사례
비전 인식 기술의 발전과 응용
Vision-Language-Action (VLA) 기반 인식 및 제어 기술
센서 시스템 구성 및 융합 기술
로봇 플랫폼 간 기술 사양 비교
농업 분야에서의 적용 가능성 및 향후 전망
Conclusion
Introduction
최근 인공지능, 센서, 제어 기술의 급속한 발전은 로봇 기술의 새로운 패러다임을 열고 있으며, 특히 인간과 유사한 형태와 동작을 구현하는 휴머노이드 로봇에 대한 관심이 증가하고 있다 (Tong et al., 2024). 이러한 로봇은 기존의 산업용 로봇과 달리, 인간이 생활하거나 작업하는 공간에서 자연스럽게 상호작용하고 다양한 역할을 수행할 수 있는 잠재력을 지니고 있다. 특히, 복잡하고 비정형적인 환경에서의 자율적 작업 수행 능력은 재난 구조, 헬스케어, 서비스 산업, 고위험 작업 등 다양한 분야에서 활용 가능성을 제시하고 있다 (Yerebakan and Boyi, 2024).
휴머노이드 로봇은 고유의 신체 구조와 인간 유사 동작 능력을 바탕으로 점차 복잡한 작업과 상황에 대응하고 있으며, 이에 따라 하드웨어 기술뿐만 아니라 인지, 판단, 행동을 통합하는 지능형 시스템에 대한 연구도 활발히 진행되고 있다 (Benos et al., 2023). 기존의 자동화 시스템이 반복적이고 구조화된 작업에 국한되었다면, 휴머노이드 로봇은 비정형 환경에서도 유연하게 대처할 수 있는 자율성과 협업 능력을 갖추는 것을 목표로 하고 있다 (Adamides and Yael, 2023).
특히, 최근에는 농업 분야와 같이 노동집약적이고 작업 환경이 불규칙한 영역에서도 휴머노이드 로봇의 적용 가능성이 주목받고 있다(Spagnuolo et al., 2025). 일반적으로 농업 분야에서는 노면 상태가 일정하지 않고, 작업 대상인 작물의 위치나 형태가 다양하며, 사람과의 협업이 빈번하게 요구된다(Huang et al., 2024). 이러한 조건은 기존의 주행형 또는 산업형 로봇으로는 효과적인 대응이 어려운 반면, 휴머노이드 로봇은 인간과 유사한 형태 및 기능을 통해 높은 수준의 적응성과 작업 수행 능력을 제공할 수 있다.
본 논문에서는 휴머노이드 로봇의 기술적 구성 요소와 주요 연구 동향을 정리하고, 농업 분야에의 응용 가능성을 중심으로 향후 발전 방향을 고찰하고자 한다. 먼저, 휴머노이드 로봇의 분류와 기술 발전 과정을 살펴본 후, 주요 적용 사례를 통해 각 로봇의 기능적 특성과 기술 수준을 분석한다. 이어서, 시각 기반 인식 기술의 발전과 이를 활용한 로봇 인지 기술의 현황을 정리하고, Vision-Language- Action(VLA) 기반의 최신 연구 동향도 소개한다. 또한, 센서 시스템의 구성과 융합 기술, 로봇 플랫폼 간 기술 사양에 대한 비교 분석을 통해 기술적 특성을 고찰하며, 농업 분야에서의 응용 가능성과 향후 전망에 대해서도 논의한다. 마지막으로, 본 논문의 내용을 종합하여 결론을 제시한다.
휴머노이드 로봇의 분류 및 기술 발전 동향
휴머노이드 로봇은 인간과 유사한 외형과 동작을 구현하기 위해 설계된 로봇으로, 다양한 환경에서 복잡한 작업을 수행할 수 있는 능력을 갖추고 있다. 이러한 로봇은 전통적인 산업용 로봇과는 달리, 비정형적인 환경에서도 인간과 자연스럽게 상호작용할 수 있는 유연성과 자율성을 목표로 개발된다. 구조적 관점에서 보면, 휴머노이드 로봇은 일반적으로 두 다리 보행형, 상반신 중심의 작업형, 전신 활용형 등으로 분류되며, 이는 로봇이 수행할 수 있는 작업의 범위와 응용 분야를 결정짓는 중요한 기준이 된다. 예를 들어, 두 다리 보행형 로봇은 이동성과 균형 제어에 초점을 맞추고 있으며, 전신 활용형 로봇은 복잡한 작업 수행과 인간과의 협업을 위한 다양한 센서 및 액추에이터가 통합되어 있다.
이러한 구조적 분류와 더불어, 최근에는 자율성, 상호작용 능력, 인지 기능 등 기능 중심의 분류가 병행되어 활용되고 있다(Isozumi et al., 2004; Kaneko et al., 2019; Bluethmann et al., 2003). 기능 중심 분류는 로봇의 내·외부 센서와 인공지능 시스템이 얼마나 인간의 판단과 행동을 모사할 수 있는지에 따라 정교화되고 있으며, 이는 로봇이 기존의 단순 자동화 기계를 넘어 지능형 에이전트로 진화하고 있음을 보여준다. 예컨대, 인간 음성을 인식하고 대화할 수 있는 언어 기반 인터페이스, 작업 상황을 판단하고 경로를 스스로 계획할 수 있는 자율 제어 시스템, 그리고 사람의 감정을 인식해 상호작용의 질을 높이는 감성 인식 기술 등이 이에 해당한다.
기술 발전 측면에서, 초기의 휴머노이드 로봇은 안정적인 이족 보행 기술 확보를 중심으로 개발되었으며, 일본의 아시모(ASIMO)는 해당 분야의 대표적인 이정표로 평가된다. 이후 센서 기술, 제어 알고리즘, 경량 고강성 소재의 발전으로 로봇의 유연성과 정밀성이 향상되었고, 인간과의 협업을 위한 안전 설계도 적극적으로 도입되기 시작했다(Kuindersma et al., 2016; Agravante et al., 2013). 특히 HRP 시리즈, Robonaut 2, Atlas 등의 로봇은 고도화된 관절 제어와 충돌 회피 기능을 통해 산업 현장, 우주 환경, 재난 구조 분야 등에서 실질적인 임무 수행 가능성을 검증하였다.
최근에는 시각, 청각, 촉각 등 다양한 감각 정보를 융합하여 처리할 수 있는 다중 센서 융합 기술과 인공지능 기반의 행동 예측 및 제어 기술이 적용되면서, 복잡한 환경에서도 자율적으로 작업을 수행할 수 있는 수준에 도달하고 있다(Negrello et al., 2016; Ding et al., 2025; Kazerouni et al., 2022). 특히, 비전 기반 인식 시스템의 발전은 로봇이 사람, 물체, 환경 요소를 정밀하게 인식하고 이를 바탕으로 행동을 계획하는 데 핵심적인 역할을 한다. 이러한 기술들은 농업을 포함한 비정형 작업 환경에서의 실질적인 적용 가능성을 크게 확대시키고 있다.
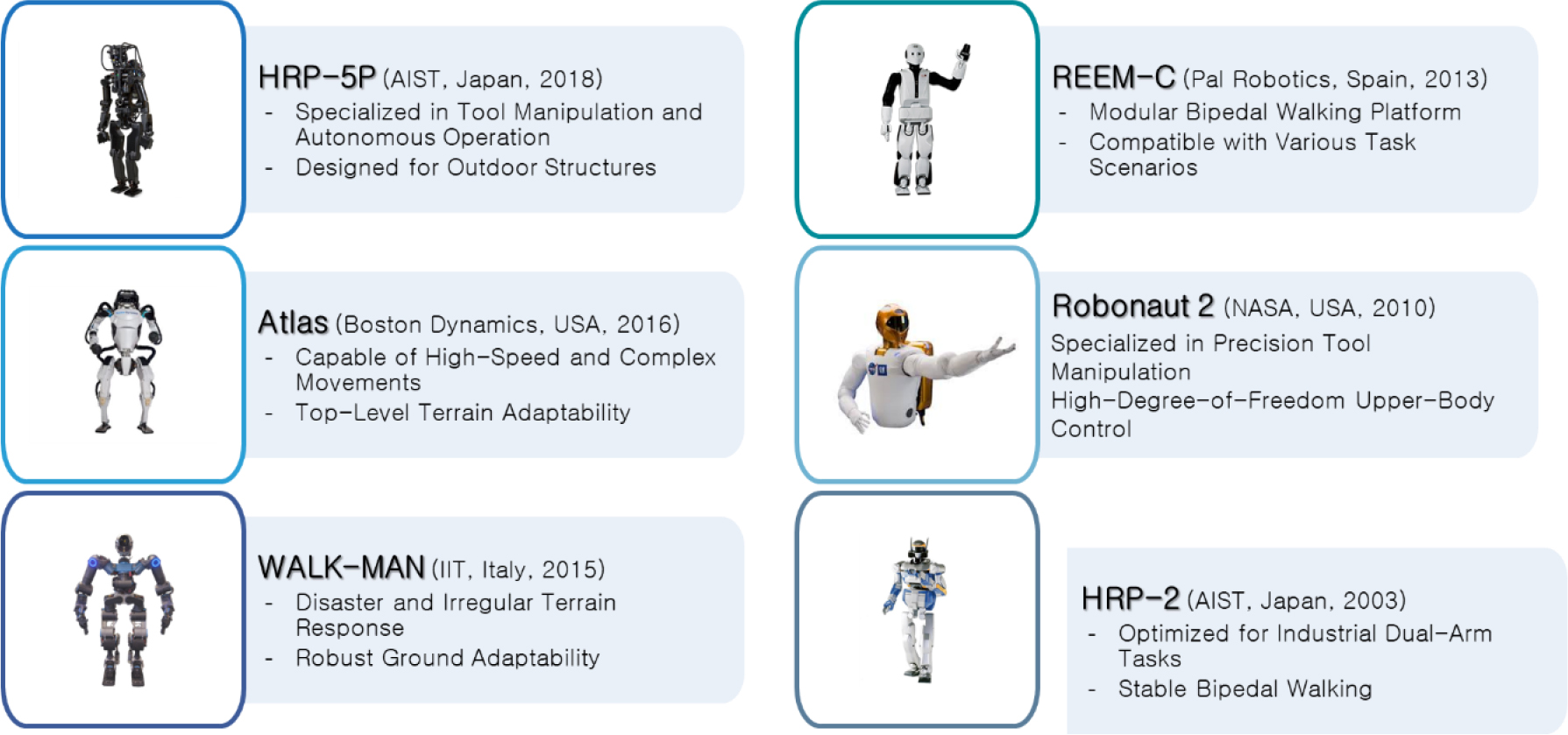
휴머노이드 로봇 기술의 발전 과정을 시계열로 정리한 Fig. 1은 각 시대별 대표 모델과 그 기술적 특성을 나타내며, 해당 기술들이 농업 분야에 어떻게 응용될 수 있는지 가늠할 수 있는 기반을 제공한다. 예를 들어, 불규칙한 지형에서의 이족 보행 기술, 반복 동작이 가능한 관절 제어 기술, 사람과의 협업을 가능하게 하는 안전 센서 시스템 등은 농업 현장에서 작업 자동화를 실현하는 데 중요한 역할을 할 수 있다. 이러한 기술 요소들은 향후 농업 분야에 특화된 휴머노이드 로봇 플랫폼 개발의 기초 자료로 활용될 수 있다.
주요 휴머노이드 로봇의 기능 및 응용 사례
다양한 휴머노이드 로봇들이 각기 다른 목적과 환경에서 개발되어 왔으며, 이들은 특정 기능에 최적화된 구조와 기술을 갖추고 있다. 이 장에서는 대표적인 휴머노이드 로봇들의 설계 목적, 기술 사양, 적용 분야를 중심으로 기능적 특성과 응용 가능성을 살펴본다. 이를 통해 농업 분야에 활용 가능한 기술 요소들을 도출하고자 한다.
고성능 이족 보행 로봇인 Atlas는 Boston Dynamics에서 개발되어 뛰어난 균형 유지 능력과 고난도 기동 수행 능력을 보이며, 28개의 유압식 관절을 통해 인간과 유사한 동작을 구현하고 복잡한 지형에서도 자율적인 이동이 가능하다. 이는 재난 구조나 고위험 작업 환경에서뿐 아니라, 농업 분야에서의 불규칙한 지형에서도 효율적인 작업 수행 능력을 제공할 수 있다(Agravante et al., 2013). Robonaut 2는 NASA와 General Motors가 공동으로 개발한 로봇으로, 우주 환경에서의 작업 보조를 목적으로 설계되었으며, 정교한 손가락 조작 기능과 모듈형 구조를 바탕으로 다양한 도구 활용이 가능하다(Bluethmann et al., 2003). 이는 농업 시설 내 협소 공간에서의 반복 작업이나 섬세한 조작이 필요한 분야에 응용 가능성이 있다. 일본 AIST에서 개발한 HRP 시리즈는 산업 현장의 자동화 및 구조물 조립을 위한 기술을 기반으로 하며, 특히 HRP-2와 HRP-5P는 뛰어난 균형 제어 및 다관절 조작 능력을 바탕으로 고도의 자율성과 협업 능력을 구현한다(Isozumi et al., 2004; Kaneko et al., 2019). 이는 대형 온실 시설의 유지보수나 구조물 조립 등에서의 활용 가능성을 제시한다. WALK-MAN은 이탈리아 IIT에서 개발된 재난 대응용 로봇으로, 비정형 지형에서의 안정적인 보행 성능과 강력한 물리적 조작 능력을 갖추고 있어, 불균형한 토양 위에서의 농작업이나 중량 물품 이송 등 농업 분야의 고난도 작업에 적합하다 (Ding et al., 2025). 한편, REEM-C는 PAL Robotics에서 개발한 범용 서비스형 로봇으로, 다양한 센서 기반 인식 시스템과 가벼운 외형을 바탕으로 인간과의 상호작용에 특화되어 있으며, 스마트 팜 내 정보 전달 및 작업자 안내 등의 역할 수행이 가능하다 (Kuindersma et al., 2016).
Table 1.
Comparison of vision-based functions by robots.
Table 1은 주요 휴머노이드 로봇에 적용된 비전 인식 기능을 비교한 내용으로, 로봇별로 어떤 인식 기술이 구현되어 있는지를 정리하였다. 이 비교를 통해 각 로봇이 수행 가능한 작업의 성격과 인식 기반 자율성 수준을 파악할 수 있다. 농업 분야에서 요구되는 환경 인식, 물체 검출, 작업자 인식 등의 기능이 포함되어 있는지 여부를 기반으로 로봇 플랫폼의 응용 가능성을 평가할 수 있다.
비전 인식 기술의 발전과 응용
비전 인식 기술은 휴머노이드 로봇의 자율성과 지능 수준을 결정짓는 핵심 요소로, 로봇이 주변 환경을 인식하고 상황에 맞게 행동을 결정하는 데 필수적인 역할을 한다. 특히 농업과 같은 비정형 환경에서는 로봇의 정확한 시각 정보 처리 능력이 작업의 성패를 좌우하게 된다. 본 장에서는 최근의 비전 인식 기술 동향과 그 응용 가능성을 중심으로 기술적 발전 수준을 고찰한다.
초기 휴머노이드 로봇의 비전 시스템은 단일 RGB 카메라를 활용한 정적 이미지 기반 인식에 머물렀으나, 최근에는 RGB-D 카메라, 스테레오 카메라, 라이다(LiDAR) 등 다양한 센서의 융합을 통해 정밀한 3차원 인식이 가능해졌다(Kazerouni et al., 2022; Liu and Zhaobing, 2024; Alatise and Gerhard, 2020). 이러한 다중 센서 기반의 인식 기술은 농업 환경에서 작물의 생육 상태 파악, 잡초 구분, 수확 여부 판단 등 복합적인 인지 과제를 해결하는 데 활용될 수 있다. 또한, 인식 대상이 움직이는 경우에도 안정적인 추적이 가능하도록 딥러닝 기반 객체 검출 모델(YOLO, Faster R-CNN 등)이 적용되면서 실시간 인식 성능이 크게 향상되었다(Zhang et al., 2017; Arani et al., 2022; Manakitsa et al., 2024).
비전 인식 기술은 단순히 환경을 보는 것을 넘어, 인식된 정보를 기반으로 상황을 판단하고 작업을 수행하는 통합적 지능의 핵심이다(Cho et al., 2023). 최근에는 단순 객체 검출을 넘어 행동 인식, 제스처 이해, 작업 순서 예측 등 고차원적 인지를 위한 연구도 활발히 이루어지고 있다(Huang et al., 2022; Gupta et al., 2024). 특히 농업 분야에서는 작업자의 동작을 인식하고 이를 보조하거나 협업하는 능력이 중요하게 부각되고 있으며, 이러한 기술은 향후 휴머노이드 로봇의 작업 효율성과 안전성을 높이는 데 핵심적인 역할을 할 것으로 기대된다.

Fig. 2는 최근 10년간 발표된 비전 인식 기술 관련 논문들을 기술 주제별로 분류하여 연도별 출현 빈도를 나타낸 것으로, 딥러닝 기반 객체 인식, 시맨틱 분할, 행동 인식 등 다양한 연구 트렌드의 변화를 시각적으로 보여준다. 특히 딥러닝 기반 인식 기술의 급속한 증가와 더불어, 실시간 인식 및 멀티모달 인지 기술에 대한 연구도 점차 확대되고 있는 것을 확인할 수 있다.
이러한 흐름은 농업 분야에서도 동일하게 적용될 수 있다. 예를 들어, 작물의 상태를 정확히 판단하고 수확 적기를 예측하거나, 작업자의 위치 및 동작을 인식하여 협업을 조율하는 등의 응용이 가능하다. 따라서 향후 휴머노이드 로봇의 농업 활용 가능성을 확대하기 위해서는 고성능의 비전 인식 기술이 필수적으로 동반되어야 하며, 센서 융합 기반의 정밀 인지 시스템, 경량 고성능 카메라 모듈, 고속 연산이 가능한 임베디드 시스템 등의 기술 개발이 함께 이루어져야 할 것이다.
Vision-Language-Action (VLA) 기반 인식 및 제어 기술
VLA는 휴머노이드 로봇의 인지 및 제어 능력을 통합적으로 향상시키는 핵심 기술로, 시각적 정보와 언어 명령, 행동 수행 간의 연계를 기반으로 로봇의 자율성과 적응력을 극대화할 수 있다. 특히 농업과 같이 비정형적인 환경에서 사람과 상호작용하며 작업을 수행해야 하는 상황에서 VLA 기술은 로봇이 맥락을 이해하고 그에 맞게 행동할 수 있도록 한다.
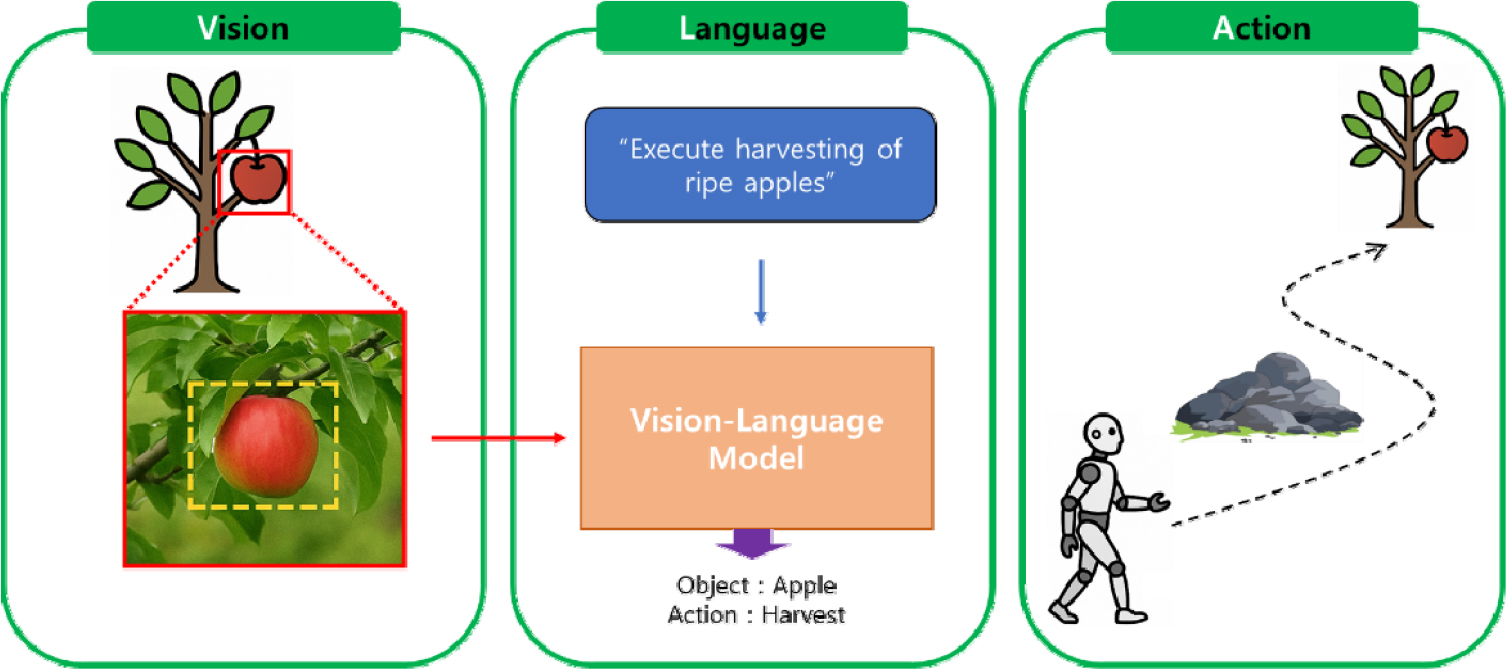
Fig. 3은 시각 정보와 언어 명령을 통합하여 작업을 수행하는 VLA 시스템의 작동 흐름을 사과 수확 사례를 통해 시각화한 것이다. 해당 구조는 시각 인식, 언어 이해, 행동 생성이라는 세 가지 모듈을 통해, 복합적인 명령을 유연하게 처리할 수 있는 작업 수행 흐름을 보여준다. 그림과 같이 구성하는 세 요소는 각각 시각 인식, 언어 이해, 행동 생성 모듈로 구분되며, 다음과 같이 설명할 수 있다. VLA 시스템은 크게 세 가지 요소로 구성된다. 첫째, 시각 인식 모듈은 환경과 객체를 인식하여 장면 정보를 추출한다. 둘째, 언어 이해 모듈은 사용자의 음성 혹은 텍스트 명령을 해석하여 작업의 의도를 파악한다. 셋째, 행동 생성 모듈은 인식된 시각 및 언어 정보를 바탕으로 적절한 행동을 계획하고 실행한다. 이러한 구조는 인간의 지각-인지-행동 메커니즘을 모사한 것으로, 로봇의 의사결정 과정에 있어 높은 유연성과 적응성을 제공한다(Favorskaya, 2023; Gouda et al., 2013).
최근에는 대규모 사전학습 모델(Pretrained Vision-Language Models, 예: CLIP, Flamingo, GPT-V 등)을 기반으로 한 VLA 연구가 활발히 이루어지고 있다. 이들 모델은 다양한 시각-언어 데이터로 학습되어 다중 작업 수행에 뛰어난 성능을 보이며, 로봇이 사전에 학습하지 않은 새로운 상황에서도 적절한 반응을 생성할 수 있도록 한다. 특히 농업 환경에서는 작업자의 음성 지시에 따라 작물을 식별하거나, 이상 징후를 설명하는 문장을 이해하고 대응하는 등의 응용이 가능하다(Pierre, 2018).
Table 2.
Comparison of features by vision recognition technology.
Table 2는 휴머노이드 로봇에서 활용되는 대표적인 비전 인식 기술들의 인식 정확도, 실시간 처리 성능, 적용 분야, 학습 데이터 요구 수준 등을 비교한 것이다. 객체 검출, 시맨틱 분할, 행동 인식, 제스처 인식 등 다양한 기술들은 각기 다른 장단점을 가지며, 특정 작업 환경에 따라 적합한 기술의 선택이 중요하다. 예를 들어, 농업 환경에서는 실시간 대응이 중요한 작업에는 YOLO 기반 객체 검출이, 작물 생육 상태를 세밀히 구분해야 하는 작업에는 시맨틱 분할 기술이 적합할 수 있다(Masoumian et al., 2022; Bai et al., 2020; Lan et al., 2024).
VLA 기술은 이러한 다양한 인식 기술들을 통합하여 상황 인식의 정밀도를 높이고, 자연어 기반의 직관적 명령 해석을 통해 사람과의 협업 수준을 향상시킨다. 또한 로봇이 작업자의 요구를 이해하고 능동적으로 대응함으로써 작업 효율성뿐만 아니라 현장 적응성도 크게 향상될 수 있다. 향후에는 비정형 언어 처리 능력 강화, 연속 동작 계획 최적화, 다중 모달 간 정보 정합성 향상 등의 기술 발전이 병행되어야 할 것이다(Mokssit et al., 2023; Vasconez et al., 2019).
센서 시스템 구성 및 융합 기술
휴머노이드 로봇의 정밀한 환경 인식과 안정적인 동작 수행을 위해 다양한 센서 기술이 활용되고 있으며, 센서 간 융합 기술은 로봇의 인지 능력을 한층 향상시키는 핵심 요소로 자리 잡고 있다. 특히 농업과 같은 비정형 환경에서는 시각, 청각, 촉각, 관성 등 복수의 센서를 조합하여 주변 환경과 대상 객체를 정밀하게 인식하고, 예측 불가능한 상황에서도 안정적으로 작업을 수행할 수 있도록 한다 (Sheridan, 2016).
휴머노이드 로봇에 사용되는 주요 센서로는 RGB 카메라, 깊이 카메라(Depth Camera), LiDAR, IMU(Inertial Measurement Unit), 터치 센서, 마이크, 온습도 센서 등이 있다. 각 센서는 고유의 특성과 한계를 가지고 있으며, 이를 보완하기 위해 다중 센서 데이터를 통합하는 센서 융합(Fusion) 기법이 적용된다. 예를 들어, 시각 정보에 기반한 객체 인식의 정확성을 높이기 위해 LiDAR 기반 거리 정보가 결합되거나, IMU 데이터를 통해 로봇의 균형 유지 및 자세 제어가 향상될 수 있다(Saleem et al., 2021).
Table 3.
Sensor configuration comparison.
Table 3은 주요 휴머노이드 로봇들의 센서 구성 요소를 비교한 것이다. 각 로봇에 탑재된 센서의 종류와 특성을 통해 로봇이 중점적으로 수행할 수 있는 작업의 유형을 유추할 수 있다. 예를 들어, HRP-5P와 Atlas는 복잡한 구조물 조립과 같은 고난이도 작업을 수행하기 위해 고정밀 시각 센서와 IMU를 복합적으로 구성하고 있으며, Robonaut 2는 우주 공간에서의 작동을 위해 정교한 터치 센서와 다중 카메라 시스템을 탑재하고 있다. WALK-MAN은 재난 구조 환경에 특화되어 열화상 센서와 고출력 LiDAR를 통해 열원 탐지 및 장애물 회피가 가능하다(Roychoudhury et al., 2023).
센서 융합 기술은 단순한 센서 데이터의 병합을 넘어, 각 센서의 정보 신뢰도와 시간 동기화, 공간 정렬 등을 고려한 통합 처리 기술을 포함한다. 최근에는 인공지능 기반의 센서 데이터 해석 기술이 융합되어, 센서 간 데이터 간섭을 줄이고 복잡한 상황에서도 안정적인 정보 해석이 가능하게 되었다. 이러한 기술은 농업 환경에서의 실시간 병해 탐지, 지면 불균일성 인식, 작업자 추적 등에 응용될 수 있으며, 향후에는 자율성과 적응성을 높이기 위한 고차원 융합 처리 기술의 개발이 필요할 것이다(Wilk-Jakubowski et al., 2022; Shi et al., 2019).
로봇 플랫폼 간 기술 사양 비교
다양한 휴머노이드 로봇은 설계 목적과 적용 환경에 따라 상이한 기술 사양을 갖추고 있다. 본 장에서는 이전 장들에서 언급된 6종의 대표적인 로봇들의 주요 사양을 비교하여 기술적 특성과 활용 범위를 분석하고자 한다. 비교 항목에는 자유도(Degree of Freedom), 적용 환경(Application Environment), 작업 유형(Task Type), 가능한 주요 동작(Key Capabilities)이 포함되며, 이를 통해 각 로봇이 어떤 작업 환경과 용도에 적합한지 파악할 수 있다.
Table 4.
Comparison of technical specifications by robots.
Table 4는 6종의 주요 휴머노이드 로봇에 대한 주요 기술적 사양을 요약한 것이다. 예를 들어, Atlas는 높은 기동성과 유연성을 바탕으로 재난 구조 환경에서의 활용이 활발하며, 복잡한 지형에서도 균형을 유지한 채 다양한 동작을 수행할 수 있도록 설계되었다. Robonaut 2는 NASA에서 개발된 로봇으로, 무중력 환경에서의 정밀 작업 수행을 위해 설계되었으며, 상체 중심의 구조와 고정밀 센서 시스템을 갖추고 있다. HRP-5P는 건설 자동화 작업을 목적으로 개발된 산업용 플랫폼으로, 반복적이고 무거운 물체를 다루는 작업에 최적화되어 있다. WALK-MAN은 구조 환경에서의 활용을 염두에 두고 설계된 이족 보행 로봇으로, 높은 자유도와 다양한 작업 동작 수행 능력을 보유하고 있다. REEM-C는 인간과의 상호작용에 적합한 설계와 안정적인 보행 기능을 갖추고 있어 연구 및 서비스 분야에 폭넓게 사용되고 있으며, HRP-2는 균형 제어 및 다양한 작업 수행 능력을 바탕으로 실험 및 실환경 테스트에 널리 사용되고 있다(Lan et al., 2024).
이러한 기술적 비교는 특정 용도에 적합한 로봇 플랫폼을 선택하거나, 새로운 플랫폼을 개발할 때 설계 방향성을 설정하는 데 중요한 기초 자료가 된다. 특히, 고도화된 휴머노이드 로봇이 실제 환경에서 자율적으로 작동하기 위해서는 기계적 성능뿐만 아니라 제어 알고리즘, 센서 융합, 에너지 효율성 등 복합 요소의 통합이 요구된다. 따라서 각 플랫폼의 사양에 대한 체계적인 분석은 향후 응용 기술 개발의 방향을 구체화하는 데 매우 유용한 접근 방식이라 할 수 있다.
농업 분야에서의 적용 가능성 및 향후 전망
로봇 기술의 발전은 농업 분야에도 변화를 예고하고 있다. 기존의 농업 자동화는 트랙터, 수확기 등 대형 기계를 기반으로 한 반복 작업 중심의 시스템에 머물렀으나, 노동력 부족, 고령화, 기후변화 등의 복합적인 요인으로 인해 보다 유연하고 지능적인 시스템의 필요성이 대두되고 있다(Mokssit et al., 2023). 이러한 배경에서 휴머노이드 로봇은 인간 중심 작업 환경에 적합한 새로운 대안으로 주목받고 있다.
휴머노이드 로봇의 농업 적용 가능성은 크게 세 가지 측면에서 살펴볼 수 있다. 첫째, 지면 상태가 일정하지 않고 작업 환경이 좁고 복잡한 농업 현장에서는 이족 보행 기술을 바탕으로 한 이동성과 균형 유지 능력이 요구된다. 둘째, 다양한 센서를 활용한 주변 환경 인지와 사람과의 협업을 위한 상호작용 능력은 농작업의 정밀성과 안전성을 높이는 데 기여할 수 있다(Vasconez et al., 2019). 셋째, 인간과 유사한 동작을 수행할 수 있는 기계적 구조는 기존의 농업 도구 및 장비와의 호환성을 높여 새로운 작업 방식의 도입 없이도 기존 시스템과 연계한 자동화가 가능하게 한다(Sheridan, 2016).
Table 5.
Types of technology applied by robot functions.
Table 5는 로봇별로 적용된 주요 객체인식기술들을 기능별로 정리한 표로, 이동성, 상호작용, 인지 능력 등 농업 환경에서 중요하게 작용하는 요소들에 대해 어떤 로봇이 어떤 기술을 갖추고 있는지를 비교한 것이다. 농업은 외부환경의 영향이 큰 분야로서 각 센서들의 장점 및 한계를 파악하고 개발하고자 하는 로봇 플랫폼 선택이나 기술 개발 방향 설정에도 참고가 될 수 있을 것으로 판단된다.
하지만 실제로 휴머노이드 로봇을 농업 환경에 적용하기 위해서는 해결해야 할 과제도 많다. 불규칙한 외부 환경에 대한 적응력, 작업 안정성 확보, 비용 대비 효율성 검토, 로봇 유지보수 및 현장 운용 편의성 등 실질적인 문제들이 존재한다. 특히, 고가의 로봇 시스템을 중소 규모의 농장에 도입하기 위해서는 경제성 확보와 더불어 모듈화된 시스템 설계, 현장 맞춤형 인터페이스 등의 기술적 해결책이 병행되어야 한다(Saleem et al., 2021). 또한, 농업 작업의 다양성과 지역적 특성에 맞춘 응용 연구가 확대되어야 할 것이다.
결국, 농업용 휴머노이드 로봇의 도입은 단순한 기술 적용을 넘어, 인간과 로봇의 협업 방식 재정립과 농업 생산 시스템 전반의 구조적 전환을 수반하는 도전 과제이다. 이를 위해선 산업계, 학계, 정부 기관 간의 유기적인 협력과 중장기적인 기술 로드맵 수립이 필수적이며, 로봇 기술이 농업 현장에 실질적인 가치를 창출하기 위한 다각도의 노력이 지속되어야 한다.
Conclusion
본 연구에서는 휴머노이드 로봇의 기술적 구성 요소, 주요 적용 사례, 시각 기반 인식 기술, VLA 기반 지능 시스템, 센서 구성 기술, 기술 사양 비교를 통해 농업 분야에의 응용 가능성을 고찰하였다. 분석 결과, 현재까지 개발된 다수의 휴머노이드 로봇은 특정 산업 또는 연구 환경을 중심으로 설계되어 있어 농업 분야에 즉시 적용되기에는 한계가 존재하나, 인간 유사 구조를 기반으로 하는 높은 적응성과 다양한 기능 구현 가능성은 농업 작업의 자동화 및 지능화에 기여할 수 있는 잠재력을 충분히 내포하고 있다. 특히, 시각 인식 기술의 고도화, 다중 센서 융합 기술의 진보, 그리고 VLA 기반의 지능형 의사결정 체계는 불규칙한 농업 환경에서의 정밀 작업 수행에 핵심적인 요소로 판단된다. 농업 분야는 작물이 외부환경에 노출되어 있어 다양한 센서를 활용하는 것이 어렵고, 숙도 및 당도, 형태 등 다양한 특성을 가진 작물에 대해 작업을 수행하므로 본 연구에서 조사한 기술을 바로 적용하기 어렵다. 따라서 농업이라는 특유의 환경 조건과 작업 특성을 반영한 전용 휴머노이드 로봇 플랫폼 개발과 더불어, 인간과의 원활한 협업을 위한 인지 및 제어 알고리즘의 최적화는 향후 지속적인 연구가 필요할 것으로 판단된다. 아울러, 기술적 측면 외에도 경제성, 안전성, 유지보수성 등의 요소를 고려한 종합적인 시스템 설계와 현장 검증이 병행되어야 할 것이다. 이를 통해 휴머노이드 로봇은 농업 분야를 포함한 다양한 산업 영역에서 인간을 보조하거나 대체하는 핵심 기술로 자리매김할 수 있을 것이다.
