

Introduction
Types of biodegradable pots
Classification of vegetable transplanters for biodegradable pots
Cylindrical pot transplanter
Biodegradable seedling plug-tray transplanter
Robotics transplanter with biodegradable pot
Future directions and recommendations
Conclusions
Introduction
Vegetable production is essential for both economic growth and global food security. According to the Food and Agriculture Organization (FAO), global vegetable production in 2022 was approximately 1.2 billion tons (FAOSTAT, 2023a), with China leading production, followed by the United States, Turkey, and India. These nations together account for a significant portion of the global vegetable supply (FAOSTAT, 2023b). In 2019, the most frequently cultivated vegetables in Korea included Chinese cabbage, onions, radishes, potatoes, green onions, tomatoes, sweet potatoes, cabbages, cucumbers, pumpkins, garlic, and peppers, all of which play a key role in the Korean diet, appearing in over 83% of meals as side dishes (Nieuwsbericht, 2021). Given the scale of global vegetable production, labor-saving and efficient transplanting techniques have become increasingly necessary. The labor-intensive nature of manual seedling transplantation, coupled with rising labor costs and shortages, has led to the demand for mechanized transplanting systems (Swe et al., 2022; Reza et al., 2021). Manual transplanting of seedlings into the field is a labor-intensive and time-consuming process, accounting for approximately 40% of the total operation time, or around 184 person-hours per hectare (Iqbal et al., 2021). In 2022, about 63.3 percent of the upland farmland in Korea was cultivated by machinery (Habineza et al., 2023). This poses a significant challenge during peak agricultural seasons when labor shortages are common. Mechanized transplanters for vegetable seedlings significantly reduce the labor required while increasing planting accuracy, speed, and overall efficiency (Khadatkar et al., 2018).
The environmental impact of plastic waste in agriculture is a pressing issue. Plastic pots and trays, widely used for seedling cultivation, contribute to the accumulation of non-biodegradable waste in the environment (Briassoulis, 2023). In contrast, biodegradable seedling pots offer a promising solution by breaking down naturally in the soil after use, minimizing pollution and contributing to a more sustainable agricultural practice (Anirudh et al., 2024). Biodegradable pots, made from eco-friendly materials such as peat, coir, and plant fibers, offer a sustainable alternative to plastic pots by decomposing naturally in the soil, reducing waste, and promoting soil health (Gupta et al., 2023). Biodegradable pots offer a sustainable, environmental friendly and alternative to plastic pots, as they help reduce plastic waste and minimize environmental pollution (Ko et al., 2023). These pots decompose naturally in the soil, promoting eco-friendly farming practices while maintaining efficiency in the transplantation process.
In case of transplanting, seedlings usually used plastic pot trays, where the seedlings must be extracted from the trays before being transplanted into the field. This extraction process can negatively impact crop growth by potentially damaging the roots of the seedlings (Jang et al., 2019). In contrast, biodegradable pot trays allow seedlings to be transplanted directly into the field without requiring extraction. This method preserves the root structure, minimizing root damage, and thus promotes healthier seedling growth (Hwang et al., 2022). There are several types of biodegradable seedling pots, each designed to cater to specific planting needs and mechanized transplanting systems. The most commonly used biodegradable pots in vegetable production include plug trays (Han et al., 2018), chain paper pots (Nambu and Tanimura, 1992), and cylindrical paper pots (Kumar and Raheman, 2011). Each type offers distinct advantages depending on the scale and type of agricultural operation.
Seedlings grown in plug trays offer uniformity and ease of handling during mechanized transplanting, while biodegradable paper pots provide an eco-friendly option by eliminating the need for plastic and allowing the pot to degrade in the soil after transplantation. Both techniques enhance transplanting efficiency and sustainability in agricultural operations. Although the production requires energy and incurs costs, they are regarded as eco-friendly since they make use of waste materials and are compostable. Additionally, the seedling can be transplanted without needing to remove it from the pot (Ko et al., 2023). Chain paper pots (Nambu and Tanimura, 1992), cylindrical paper pots (Kumar and Raheman, 2008), and biodegradable seedling plug-trays (Paudel et al., 2024) are the three major types of biodegradable seedling pot vegetable transplanters. A transplanter that applies chain paper pots was created as a test case for biodegradable pot trays applied to agricultural equipment (Suggs et al., 1987). Nambu and Tanimura (1992) applied planting fingers to the transplanting device of the vegetable transplanter to create the Ferris-type transplanting mechanism for biodegradable pot trays connected in a single line. Grasping a cell with its planting fingers, the biodegradable pot tray revolved like a Ferris wheel, releasing the cells into the soil (Nambu and Tanimura, 1992). According to Suggs et al. (1987), the transplanter using the Ferris-type transplanting mechanism had a work efficiency of 100 cells per minute.
Mechanized transplanting systems have become increasingly important in modern agriculture, particularly for vegetable production, where labor shortages and rising labor costs are persistent challenges. These systems automate the transplanting process, ensuring consistent planting depth, spacing, and accuracy. When combined with biodegradable seedling pots, mechanized systems offer a powerful solution to improve efficiency and sustainability in agricultural operations. Automated transplanting machines are designed to plant seedlings at high speeds with minimal human intervention. These machines are equipped with sensors and controls that allow for precise handling of seedlings, ensuring that they are planted at the correct depth and spacing (Xin et al., 2019). The use of biodegradable seedling pots in these machines eliminates the need for extracting seedlings from plastic containers, reducing the risk of root damage and enhancing the overall planting process (Gupta et al., 2023). A transplanter that can move a biodegradable pot tray with several rows and columns was developed by Kumar and Raheman (2011). Circular blades moved left to right to cut a biodegradable pot tray into many cells. The seedling drop tube then lowered each cell into the earth (Kumar and Raheman, 2011). To pick and drop tomato seedlings grown in biodegradable paper pots, Paradkar and Raheman (2021) devised an automated metering system for a vegetable transplanter. A study has been done to reduce the amount of time needed to extract and cut biodegradable pot trays for high-speed machine transplanting using circular blades to less than one second (Lee et al., 2017). In order to remove the need for a complicated clamping mechanism and separate seedlings with plug-cells from plug trays, Paudel et al. (2024) recently invented the biodegradable plug- tray cutting mechanism (SPCM), while the Ferris-type transplanting mechanism is capable of planting up to 100 cells per minute, making it ideal for large-scale operations.
The adoption of biodegradable seedling pots and mechanized transplanting systems represents a significant step forward in addressing the challenges of modern vegetable production. These innovations not only reduce the environmental impact of plastic waste but also improve the efficiency and sustainability of transplanting operations. As research and technology continue to advance, the integration of biodegradable pots and mechanized systems will play a key role in shaping the future of sustainable agriculture. This review focused on the latest trends in the development and application of biodegradable seedling pots, as well as their integration into mechanized transplanting systems.
Types of biodegradable pots
The use of plastic seedling pots began in the 1960s and quickly gained popularity in Western countries (Styer and Koranski, 1997). However, with the growing concern over plastic waste and environmental pollution, there has been a shift toward biodegradable alternatives. In recent years, biodegradable products have become preferred over plastics, prompting researchers to develop and study the properties of seedlings grown in biodegradable pots (Basak et al., 2019; Jang et al., 2020; Jeong et al., 2020; Lee and Lee, 2019; Ndikumana et al., 2019). In the agricultural sector, efforts have been made to develop biodegradable pot trays as a replacement for traditional plastic trays, including the use of paper sludge (Schrader et al., 2013; Nandede et al., 2014). Research has shown that biodegradable materials decompose effectively when buried in soil, with positive effects such as enhanced growth and leaf development in pepper plants (Fuentes et al., 2021). The development of biodegradable pots dates back to the early 1990s. In 1991, Warner Waldenmeier patented a foldable, biodegradable plant pot made from corrugated cardboard with a polyester coating (Waldenmeier, 1991). In 2004, containers made from peat and poultry feather waste were evaluated against plastic containers, examining factors like strength, irrigation efficiency, and plant growth (Evans and Hensley, 2004; Evans and Karcher, 2004). Additionally, pots made from tomato and hemp fiber waste, which degraded in 16 days, showed a positive impact on plant height (Schettini et al., 2013). Commercial pots made from peat moss, wood fiber, and cow manure were tested for properties such as water absorption, strength, germination, and biodegradation (Zhang et al., 2019). Further studies tested seedling pots made of paper and textile waste mixed with cotton and poly-cotton, showing 100% seed germination with optimal strength compared to other commercial seedling pots (Juanga-Labayen and Yuan, 2021). More recently, improvements in tensile and bursting strength of biodegradable pot trays were achieved by combining paper sludge with waste newspaper, wet strength agents, and water repellents (Lee et al., 2014). Table 1 summarizes different types of biodegradable pots and their effect on plant/crop growth.
Table 1.
Different types of biodegradable pots and their effect on plant/crop growth.
| Name | Material | Major crop | Effect on yield and health | Reference |
| Bio-pot | Oil palm trunk | Chili, Eggplant |
No significant difference with plastic pot | Choowang et al. (2022) |
| Biodegradable pots |
Paddy straw, corn starch, glycerol | Cucumber | Facilitating the roots penetration | Saha and Hariprasad (2022) |
|
Biodegradable seedling plug tray |
Peat moss, Wood fiber, Cow manure | Bean |
No effect on seedling height, improved root length | Zhang et al. (2019) |
|
Biodegradable seedling pots | Recycled paper waste | Hybrid broccoli |
No effect on germination or seedling growth. | Paudel et al. (2022) |
|
Biodegradable container |
Mushroom cultivation residuals | Tomato |
Provide better morphology, indicating stress tolerances | Postemsky et al. (2016) |
|
Bio composite sheet pots |
Tomato and hemp fibers waste | Pepper |
Dense active roots with no deformation | Schettini et al. (2013) |
|
Biodegradable plant nursery container |
Sawdust, hydrolyzate, soybean oil, ethylene diamin | Pepper | Variation in root development | Sartore et al. (2018) |
| Bio container |
Seaweed waste, calcium carbonate | Seagrass, Dune |
Boosted plant performance in nurseries | Balestri et al. (2019) |
| Biodegradable Pot |
Banana peel Tapioca, Glycerol, Vinegar | - |
Increased microbial decomposition | Rafee et al. (2019) |
| Bio composite pot | Straw | Flower plant | Promoted plant growth | Sun et al. (2019) |
| Biodegradable poly |
Polylactic acid, Cellulose, KNO3 | Tomato, Chicory |
No significant effect on growth and yield | Calcagnile et al. (2019) |
| Biodegradable pot |
Recylced polyester, plant fiber | Poinsettia | Long-term cultivation cycle | Castronuovo et al. (2015) |
Classification of vegetable transplanters for biodegradable pots
Vegetable transplanters designed for biodegradable seedling pots can be classified based on their operating principles and pot structure into chain paper pot transplanters, cylindrical paper pot transplanters, and biodegradable plug seedling tray transplanters as shown in Fig. 1.
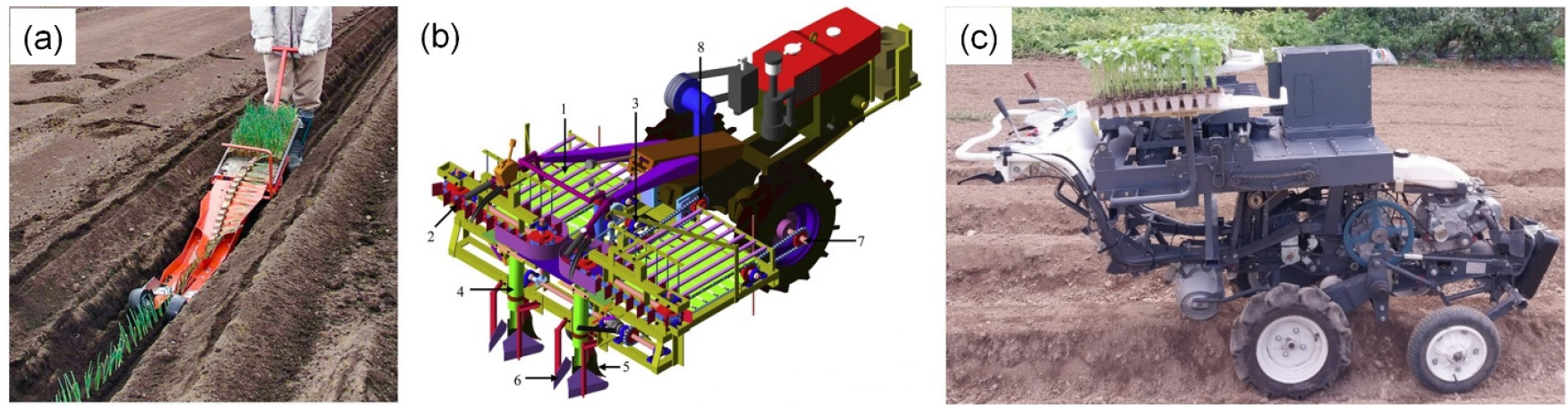
Fig. 1.
Classification of different vegetable transplanters for biodegradable pot seedlings: (a) chain paper pot, (b) cylindrical paper pot, and (c) biodegradable plug seedlings trays (modified from Kumar and Raheman, 2011; Paudel et al. 2024).
Chain paper pots are a novel approach to biodegradable seedling containers. These pots are linked together in a chain-like structure, allowing for continuous and efficient planting. As the transplanter moves across the field, the chain of pots is fed through the machine, enabling the seedlings to be planted in rapid succession. Chain paper pot transplanters, often hexagonally shaped, utilize a continuous chain of connected paper pots that self-feed through the transplanter. These machines are typically hand-pulled and manually operated, capable of planting approximately 264 seedlings in under 5 minutes, or 33 seedlings in 40 seconds. The transplanter opens a narrow furrow, guiding the paper chain into the ground while covering the plants with soil using a pair of metal wings (Kaushik et al., 2020).
The advancement of mechanized transplanting technology has led to innovations. Kumawat et al. (2020) developed a 15 hp mini tractor-operated 4-row automatic onion transplanter for seedlings raised in a hexagonal (honeycomb) paper pot chain. The paper pot chain, measuring 800 mm by 180 mm by 40 mm, holds 128 seedlings with 10 cm row spacing. The transplanter features a furrow opener, covering device, conveyor belt, cutting units, seedling delivery tubes for each row, and two ridge creating 40 cm wide ridges. A belt-type conveyor moves the pots, while a Geneva mechanism synchronizes the conveyor with a vertical blade, ensuring precise operation with an 8:1 gear ratio as shown in Fig. 2. The paper pot chain is conveyed to the furrow opener via seedling delivery tubes, with singulation achieved by three rotary cutters and a vertical blade. The rotary cutters, powered by the ground drive wheel, tear the chain lengthwise, while the vertical blade, driven by a 12V 600 W DC motor, cuts perpendicularly to separate individual seedlings for delivery. The vertical blade’s movement, controlled by a slider crank mechanism with a 7 cm range, ensures minimal seedling damage. Operating at an average speed of 3.0 km/h, the transplanter has a missing index of 33% and a multiple index of 18.77%, showing potential to enhance transplanting efficiency while reducing labor.

Fig. 2.
Tractor-drawn automatic onion transplanter: (a) schematic diagrams of the onion transplanter, (b) onion seedlings in honeycomb-patterned chain-type paper pots, and (c) the cutting unit with Geneva mechanism: (1) a DC motor, (2) a slider-crank mechanism, (3) a vertical blade, (4) a rotary cutter, and (5) the Geneva mechanism (modified from Kumawat et al., 2020).
Kaushik et al. (2020) developed a hand-pulled, manually operated paper pot transplanter that uses a chain of connected paper pots to self-feed through the machine. Capable of planting 264 seedlings in under 5 minutes, or 33 seedlings in 40 seconds, the transplanter allows for upright operation, eliminating the need for kneeling or stopping. It opens a narrow furrow, guides the paper chain into the ground, and covers the plants with soil using metal flanges. At the start of each row, the lead cell is pulled into the furrow and staked, allowing the transplanter to smoothly continue planting as it is moved forward as shown in Fig. 3.
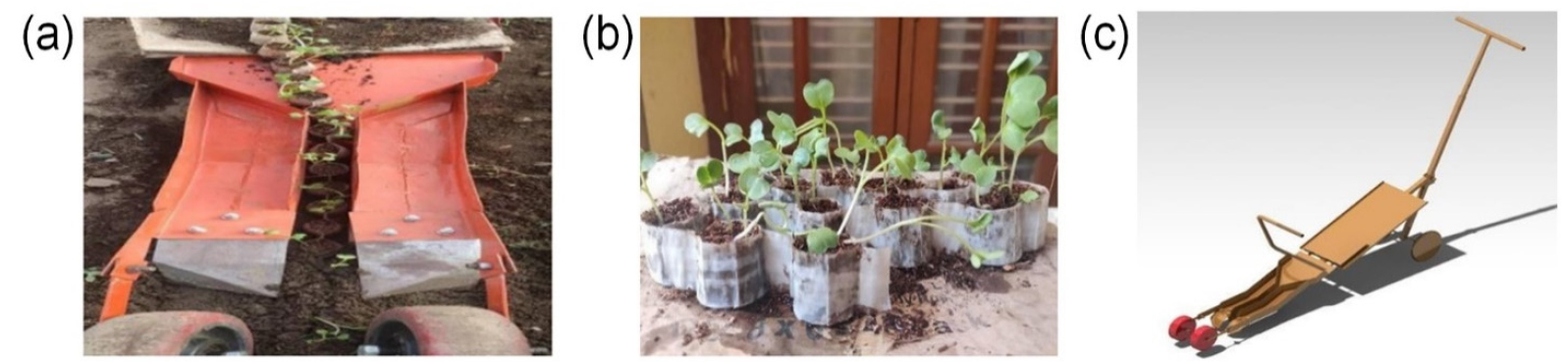
Fig. 3.
Manually operated paper pot transplanting machine: (a) paper pot transplanting machine in work, (b) biodegradable paper pot with seedlings, and (c) 3D model of assembled transplanter (modified from Kaushik et al., 2020).
The conveyor-type metering mechanism is widely used in semi-automatic and automatic vegetable transplanters for planting potted seedlings of crops like tomatoes, cabbage, celery, and broccoli (Khadatkar et al., 2018). These seedlings are either linked by a continuous chain or grown in hexagonal paper trays, with the system powered manually or by a mechanical source (Boa, 1984; Yonetani et al., 1999; Tsuga, 2000). Suggs et al. (1987) described the working principles of two machines for transplanting paper-pot seedlings as shown in Fig. 4. The Ferris wheel transplanter grips seedlings between a pair of rotating hands that release them into a furrow, achieving a planting rate of 100 seedlings per minute. Another system, the roll feed transplanter, feeds seedlings between rollers and propels them into a drop tube after separating the strand, operating at a rate of 140 seedlings per minute. Tsuga (2000) further developed three models of two-row riding-type automatic transplanters, suitable for cell mold and pulp mold pot seedlings of crops like cabbage, Chinese cabbage, and lettuce.
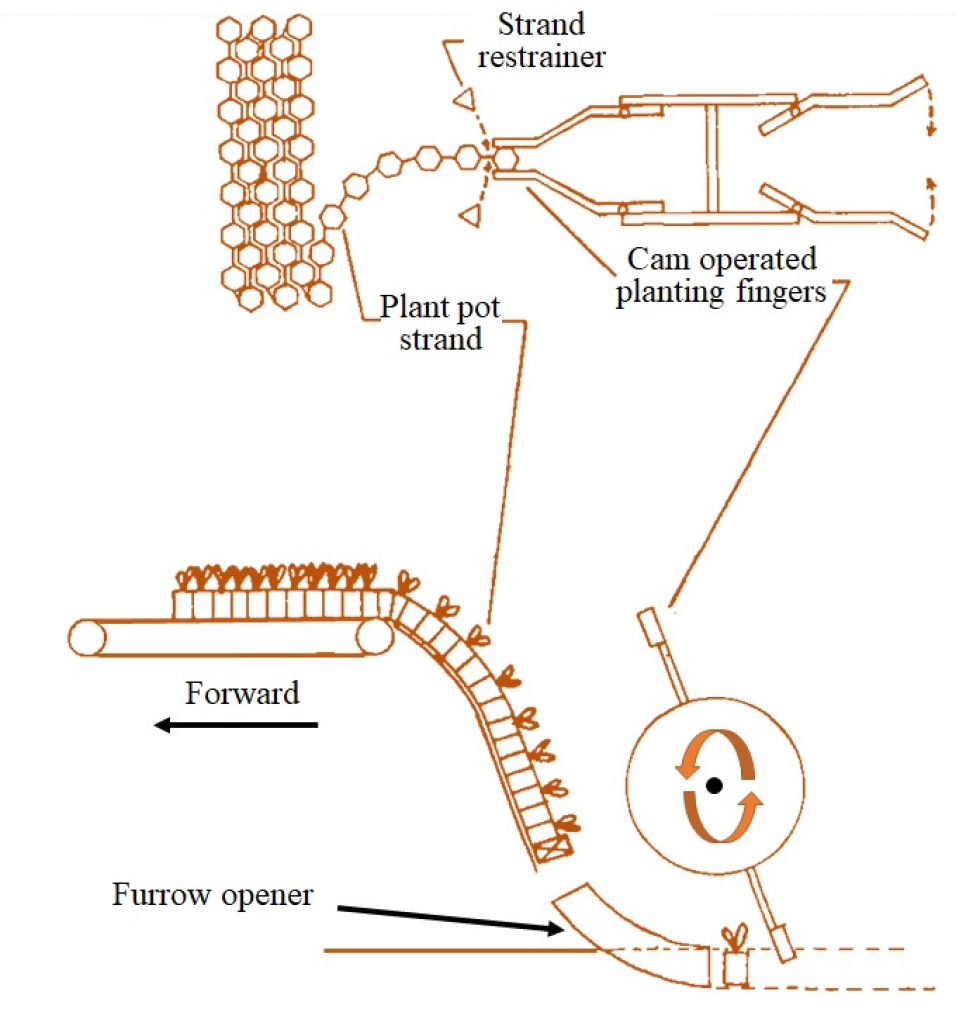
Fig. 4.
A linked chain-type mechanism used in self-feeding transplanters designed for plants grown in honeycomb-shaped cells or paper pot seedlings, allowing for efficient and continuous planting (modified from Suggs et al., 1987).
Cylindrical pot transplanter
Another type of transplanter is designed for handling individual cylindrical biodegradable pots, utilizing various metering mechanisms, such as a combination of horizontal and vertical conveyors (Kumar and Rahman, 2011), auger-type mechanisms (Chilur et al., 2018), and rotating cup types (Nandede and Raheman, 2015), each offering precise control over seedling placement and spacing. Cylindrical paper pots are designed for vertical transplantation and are known for their robustness in mechanized systems. The cylindrical shape supports the root structure of the seedlings, allowing for proper root development and easy integration with transplanting machines. These systems often feature an automatic feeding mechanism coordinated by a timing shaft, cam, and clutch to synchronize the feeding and metering conveyors. A transplanter using this design can hold 108 seedlings on two feeding conveyors, maintain them in an upright orientation, and efficiently plant them in furrows (Kumar and Rahman, 2011).
Kumar and Raheman (2011) developed a 9.75 kW walk-behind, 2-row fully automatic vegetable transplanter for individual paper pot seedlings. The transplanter featured two sets of feeding conveyors, a metering conveyor, seedling drop tube, furrow opener, soil covering device, depth adjustment wheel, and an automatic feeding mechanism with a timing shaft, cam, and clutch for coordination as shown in Fig. 5. The horizontal slat-type conveyor handled feeding, while a pusher-type conveyor managed metering. The transplanter, with a capacity of 108 seedlings, was tested for transplanting tomatoes at 45 cm spacing and a forward speed of 0.9 km/h. It achieved a field capacity of 0.026 ha/h, with a planting rate of 32 seedlings/min, 4% missed planting, and 5% tilted planting.

Fig. 5.
Conceptual operation of a vegetable transplanter for paper pot seedlings: (a) arrangement of paper pot seedlings on the feeding conveyor, (b) transfer of a linear array of seedlings to the metering conveyor, (c) continuous movement of seedlings toward the discharge point, and (d) cylindrical paper pot seedlings of tomato prepared for planting (modified from Kumar and Raheman, 2011).
Chilur et al. (2018) developed an auger-type metering mechanism for transplanting paper pot seedlings, consisting of a metering device, seedling delivery tube, furrow opener, furrow closer, power transmission system, and frame as shown in Fig. 6. The performance of the system was evaluated for intra-row spacing, seedling inclination, soil coverage, and efficiencies: conveying (CE), feeding (FE), transplanting (TE), and overall (OE). At forward speeds ranging from 1.6 to 2.0 km/h, CE, FE, TE, and OE all exceeded 90%. However, when the speed surpassed 2.0 km/h, while FE stayed above 90%, TE and OE fell below 55%. The mechanism efficiently handled planting rates of 53 to 65 seedlings per minute at speeds up to 2.0 km/h. Nandede and Raheman (2015) designed a multi-stage rotating cup metering mechanism for transplanting vegetable seedlings such as tomato, brinjal, and chili, which were grown in paper pots. The system incorporated components like a seedling feeding wheel, metering wheel, slotted plate, seedling delivery tube, furrow opener, closer, and a power transmission system as shown in Fig. 7. At speeds between 0.6 and 2.2 km/h, feeding, conveying, planting, and overall efficiencies were above 90%. However, when the speed reached 3.2 km/h, even though feeding and conveying efficiencies remained over 90%, planting efficiency dropped to around 50% because the seedlings were placed into the furrow at angles greater than 70 degrees, making them unsuitable for proper transplanting.
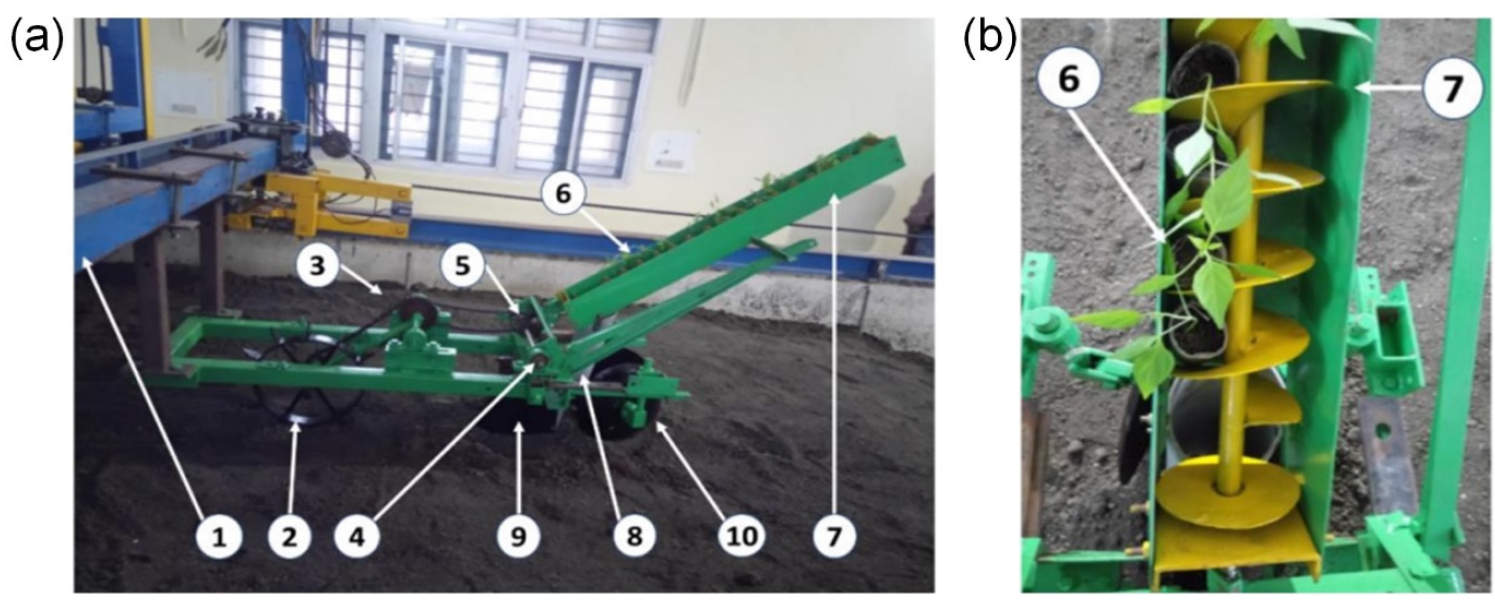
Fig. 6.
Auger type transplanter metering unit: (a) side view: (1) implement trolley, (2) ground wheel, (3) power transmission system, (4) main shaft, (5) bevel gear holding assembly, (6) seedling feed side of auger box, (7) auger conveyer unit, (8) delivery tube, (9) furrow opener, and (10) furrow closer, and (b) top view (modified from Chilur et al., 2018).
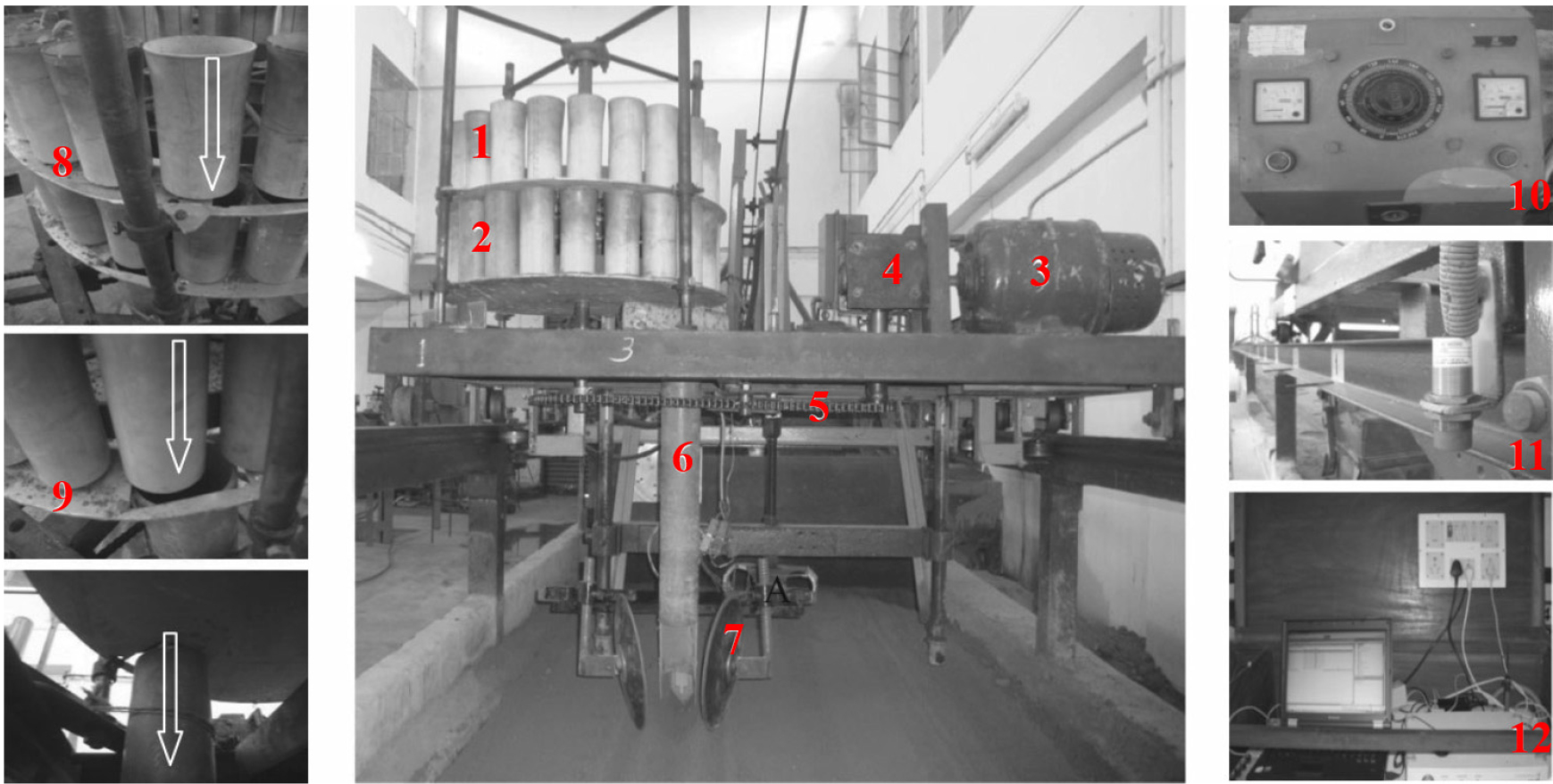
Fig. 7.
Multistage metering unit of vegetable seedling transplanter: (1) seedling feeding wheel, (2) seedling conveyer cum feeding wheel, (3) DC motor, (4) gearbox, (5) chain and sprocket of power transmission, (6) delivery tube, (7) shovel opener with disc closer attachment, (8) slotted plate for feeding wheel, (9) slotted plate for metering wheel, (10) speed controller, (11) linear speed measurement setup, and (12) data acquisition system (modified from Nandede and Raheman, 2015).
Biodegradable seedling plug-tray transplanter
Biodegradable plug trays are widely used in seedling production due to their uniformity and ease of use in automated transplanting systems. These trays consist of individual cells, each holding a seedling, and are made from materials like peat, coir, or paper. The uniform size and shape of the cells make it easy for automated systems to handle the seedlings during the transplanting process. The Biodegradable SPCM is an innovative system designed to simplify the separation of seedlings from plug trays, eliminating the need for complex clamping mechanisms. The SPCM comprises three sub-mechanisms that work together to align the plug-cell at the seedling discharge point, cut and separate the plug-cell from the tray, and allow the seedling to drop directly into the transplanting hopper. This streamlined approach enhances the efficiency of the transplanting process while maintaining the integrity of the seedling (Paudel et al., 2024).
Hwang et al. (2022) developed an automatic pot feeding device specifically for biodegradable pot trays. The tensile and bending strengths of the biodegradable trays were measured, revealing they were 0.06 and 0.17 times weaker than plastic trays. To address this, a new extraction mechanism was designed, accounting for the tray’s physical properties and geometry. The device, consisting of pot slots, separating blades, holders, air cylinders, and a conveyor, was able to supply 240 trays per hour to the seeding process without deforming or damaging the biodegradable trays as shown in Fig. 8.
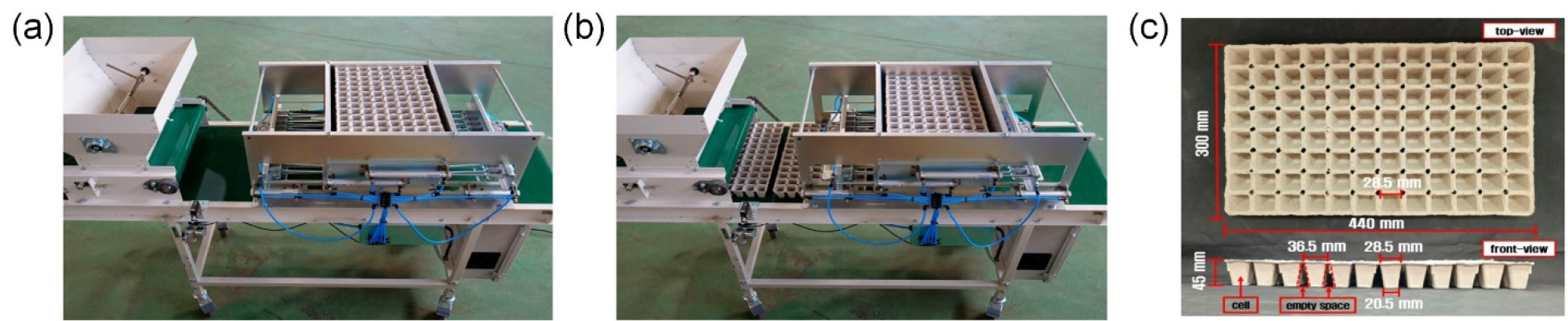
Fig. 8.
Pot auto feeding device: (a) initial condition, (b) operating condition, and (c) dimensions of the biodegradable pot tray (modified from Hwang et al., 2022).
Paudel et al. (2024) developed a biodegradable plug tray cutting mechanism, SPCM that simplifies seedling separation by eliminating the need for a complex clamping mechanism. The SPCM uses three sub-mechanisms to align, cut, and separate plug-cells, delivering 82% of the seedlings to the planting unit as shown in Fig. 9. In tests, the SPCM-equipped transplanter achieved 74% transplanting efficiency for pepper and cabbage seedlings, with a field efficiency of 68%, field capacity of 0.032-0.035 ha/h, and reduced labor by 73% compared to manual transplanting. Most pepper seedlings (85%) were transplanted with a planting angle under 10°, and cabbage seedlings were adequately planted at depths of 48 mm for cabbage and 53 mm for pepper.
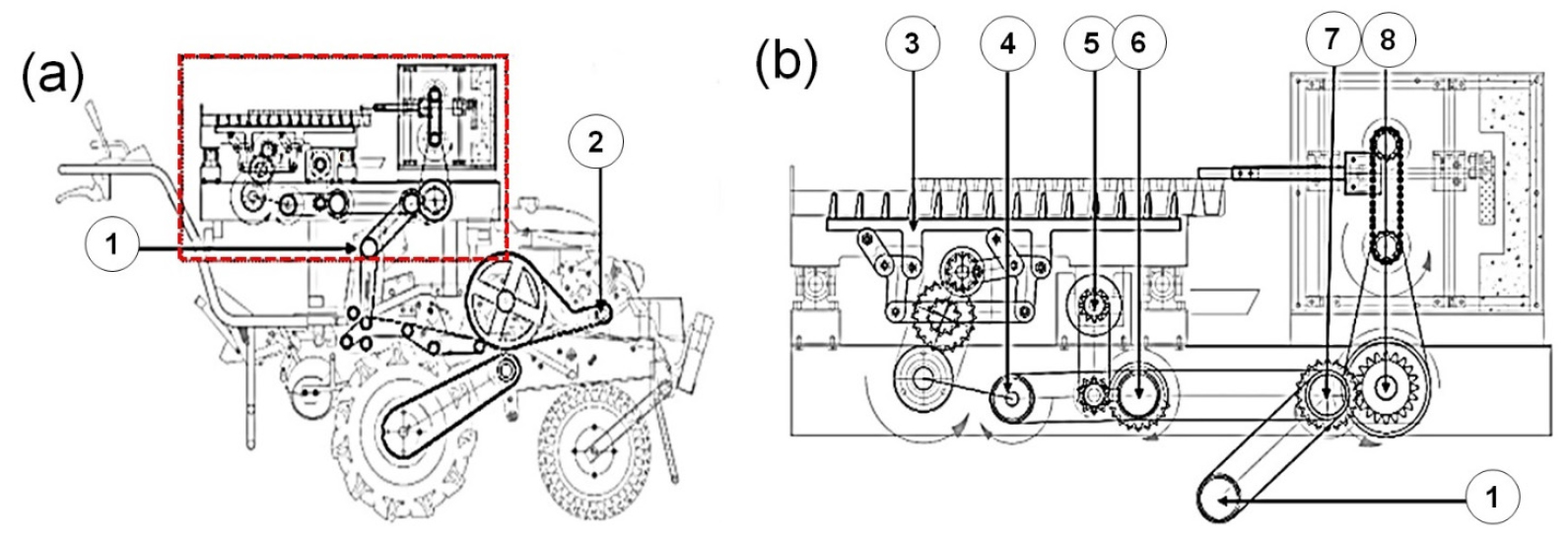
Fig. 9.
Biodegradable plug tray cutting mechanism: (a) transplanter: (1) SPCM powered sprocket, and (2) transplanter engine, and (b) different parts of the SPCM cutting mechanism: (3) tray pushing spikes, (4) wedge-shaped cam, (5) grooved shaft, (6) Cog gear, (7) driving gear, and (8) driven gear (modified from Paudel et al., 2024).
Robotics transplanter with biodegradable pot
Robotic transplanting systems represent the next step in the evolution of mechanized agriculture. These systems use robotic arms and artificial intelligence (AI) to handle seedlings with precision and care (Gupta and Gupta, 2024). The integration of biodegradable pots with robotic systems allows for even greater efficiency, as the robots can handle the pots without the need for manual intervention (Khadatkar et al., 2024). Robotic systems are particularly beneficial in large-scale agricultural operations, where the speed and accuracy of the transplanting process are critical (Fountas et al., 2020). These systems can be programmed to handle a wide range of biodegradable pots, including plug trays, chain paper pots, and cylindrical paper pots, ensuring that the seedlings are planted at the optimal depth and spacing.
Paradkar et al. (2021) developed an automated metering system for a vegetable transplanter, incorporating a 3-DOF robotic arm and an automatic feeding conveyor. The system was designed to handle tomato seedlings in biodegradable paper pots (50 cm³, 47g) as shown in Fig. 10. A matrix-type conveyor moved seedlings to a position where the robotic arm could pick and drop them. An LDR-LED sensing unit controlled the conveyor’s movement. The system handled 20 seedlings per minute with a cycle time of 2.5 to 3.1 seconds. Power consumption for the conveyor and robotic arm was 18 W and 16 W, respectively. Under lab conditions, the conveying, metering, and overall efficiencies were 96.83%, 95.91%, and 92.86%, while field conditions resulted in 94.7%, 93.28%, and 88.33%. The system efficiently handled seedlings without damage, offering a lightweight, effective solution for mechanized transplanting.
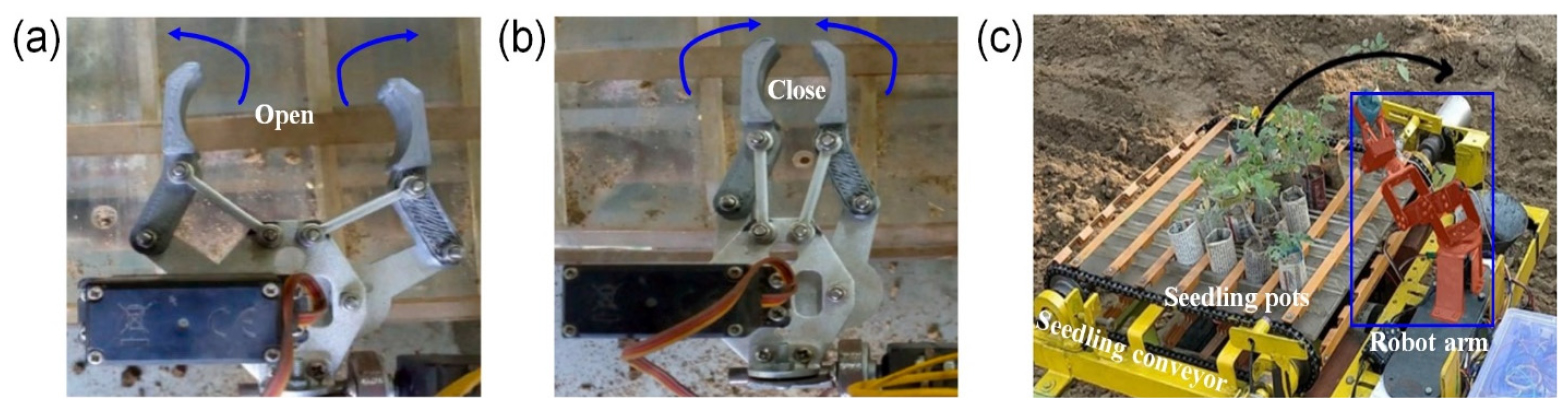
Fig. 10.
Schematics of the robotic gripper: (a) open position, (b) close position, and (c) robot arm with gripper while lifting a paper pot from the feeding conveyer (modified from Paradkar et al., 2021).
Qingxi et al. (2017) developed an embedded pneumatic picking-up mechanism to address the complexity and control instability of traditional mechanical systems. The design, working principles, and kinematics model of the mechanism were clarified, and a control system using a single chip was developed as shown in Fig. 11. ADAMS software simulations analyzed the effects of parameter variations on the trajectory and posture of the picking arms. The optimized parameters were LAD (220 mm), LAC (170 mm), IDE (160 mm), and l₁ (313 mm), resulting in a picking trajectory height of 130 mm. At 80 mm height, the trajectory’s straightness deviation was under 2 mm, with declination angles of less than 4º during seedling pickup and 1º during seedling release. High-speed photography experiments showed a 93.0% success rate for seedling pickup and 89.5% for seedling release, meeting operational requirements. This research provides a theoretical foundation for further development of automatic seedling picking and transplanting mechanisms.
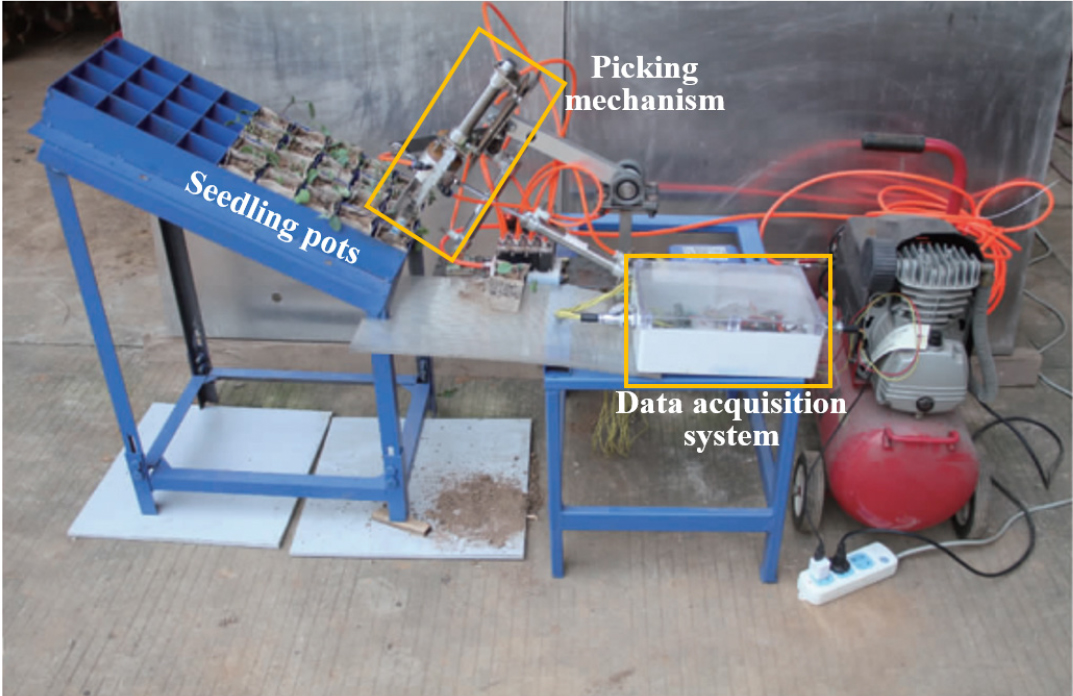
Fig. 11.
Pneumatic picking-up mechanism for biodegradable seedling pots (modified from Qingxi et al., 2017).
Future directions and recommendations
To further drive the adoption and effectiveness of biodegradable pots and associated transplanting technologies, several areas require focused attention:
1.Optimization of biodegradable pot materials: Future research should prioritize the development of stronger, more durable biodegradable pot materials that can maintain their integrity during mechanical handling yet degrade efficiently in a variety of soil conditions. This balance is crucial for ensuring successful seedling establishment and promoting healthier plant growth.
2.Enhancement of automated transplanting systems: The development of more efficient, cost-effective automated transplanting machines specifically designed for biodegradable pots is essential. These machines should be accessible to a wider range of farmers, including small- and medium-scale operations, to encourage broader adoption of sustainable transplanting practices.
3.Large-scale field testing: Conducting large-scale field trials in diverse environmental and soil conditions will provide valuable data on the practical application of biodegradable pots and transplanting systems. These trials will help refine the technology, improve performance metrics such as planting accuracy and speed, and ensure the technology’s suitability for various agricultural contexts.
4.Collaboration between stakeholders: Collaboration among researchers, agricultural engineers, policymakers, and industry stakeholders is critical to advancing these technologies. Developing standardized guidelines for the use of biodegradable pots and transplanting systems, along with providing subsidies or incentives for farmers transitioning from plastic to biodegradable alternatives, will further support the adoption of sustainable practices.
5.Environmental impact assessment: Comprehensive assessments of the environmental impact of biodegradable pots and automated transplanting systems must be conducted to ensure their long-term sustainability. These assessments should consider factors such as soil health, degradation rates of biodegradable materials, and the overall reduction in carbon footprint compared to traditional plastic-based systems.
6.Training and education for farmers: Providing farmers with training and educational resources on the use of biodegradable pots and mechanized transplanting systems will facilitate smoother transitions and enhance the success of these technologies. Extension services, workshops, and hands-on demonstrations can play a pivotal role in equipping farmers with the knowledge and skills needed to implement these innovations effectively.
Conclusions
This study presents an in-depth analysis of the evolution and integration of biodegradable pots in modern agricultural practices, focusing on their application in conjunction with advanced transplanting technologies. The transition from traditional plastic seedling pots to biodegradable alternatives signifies a major step forward in sustainable agriculture, driven by the need to reduce plastic waste and mitigate environmental pollution. Biodegradable pots have been developed using a range of materials, including paper sludge, peat, poultry feather waste, and plant fibers, each offering varying levels of effectiveness in supporting plant growth and degrading in soil environments. The development and performance of automated transplanters tailored for biodegradable pots have been a critical focus of this study. Systems such as the chain paper pot transplanter, cylindrical paper pot transplanter, and biodegradable seedling plug-tray transplanter illustrate significant progress in mechanizing the transplanting process. These innovations have demonstrated potential in increasing planting efficiency, reducing labor dependency, and preserving the structural integrity of seedlings during the transplanting process. Moreover, the growing role of robotics and automation in transplanting operations underscores the potential for further advancements in precision agriculture, where efficiency, sustainability, and accuracy are paramount.
The findings from this study highlight the ability of biodegradable pots to not only replace traditional plastic pots but also to contribute to more sustainable agricultural systems. Integrating these biodegradable materials with advanced transplanting technologies can create more eco-friendly and efficient farming practices that align with global sustainability targets. However, while the current advancements are promising, widespread adoption of these technologies will require continued innovation, extensive field testing, and detailed environmental impact assessments to ensure practicality and long-term benefits across diverse agricultural practices. Continued research, innovation, and collaboration will be essential to refining these technologies and ensuring their widespread adoption in agricultural practices, contributing to a more sustainable and resilient global food system.
